Как сделать конструктор металлический
Обновлено: 27.09.2024
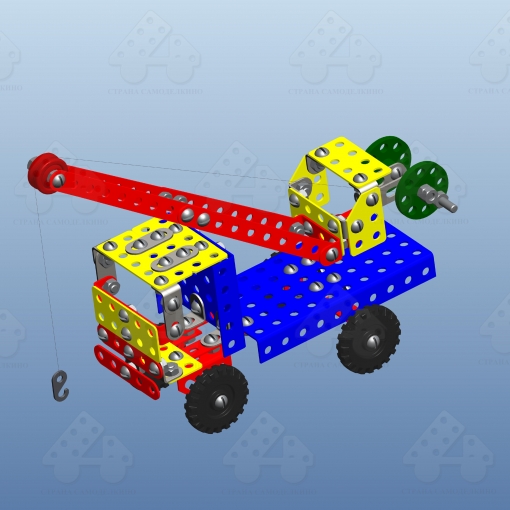
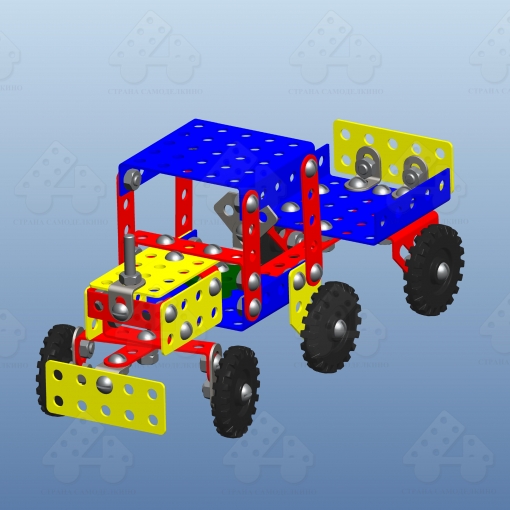
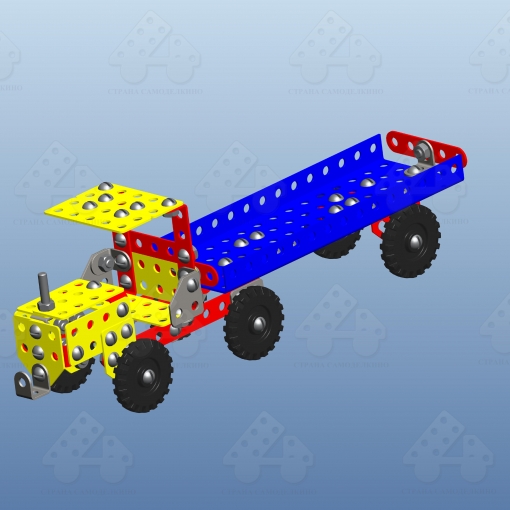
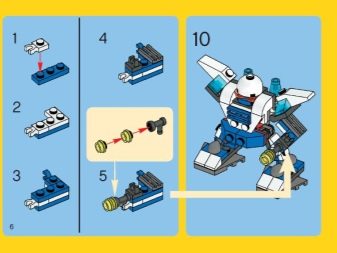
Сборка модели самосвала из металлического конструктора

Предлагаем следующий вариант сборки модели
Начнем сборку с кузова самосвала


Далее последовательно соберем капот самосвала согласно рисункам




Установим фары и руль. Уголок 1 отгибаем на необходимый угол

Отложим ненадолго собранные части и приступим к сборке шасси самосвала


Начинаем сборку кабины

Устанавливаем капот и начинаем собирать крышу

Устанавливаем колеса и заканчиваем сборку крыши

Теперь можно установить кузов с помощью 2 гаек М4


Если Вам понравилась модель, не забываем делиться с друзьями. Ссылки ниже)
Как сделать конструктор металлический
АЛЬБОМ МОДЕЛЕЙ ИЗ МЕТАЛЛИЧЕСКОГО КОНСТРУКТОРА













































































© 2000-2021 Страна Самоделкино ТМ. Любое использование материалов допускается с указанием активной ссылки на источник.
Превращаем картонную электрическую схему в настоящую или как сделать простой конструктор из настольной игры
Ранее я уже рассказывал, как сделать самодельный аналог «электрических кубиков» из картона и как придумал настольную игру на построение электрических цепей (которая после успешно собрала средства на издание через краудфандинг и которую уже можно купить).
После запуска издания игры «Не закороти Цепь!» меня посетила мысль: «А что, если сделать обратный процесс?». То есть возможно ли превратить квадратные красивые кусочки картона в компоненты простого электротехнического конструктора и, желательно, без порчи картонных жетонов самой игры.
Вызов был принят и работа закипела.
За основу было решено также взять магнитный принцип крепления. Вопрос оставался как закрепить магниты, из чего сделать контактные площадки компонентов и, главное, как обойтись при этом подручными средствами и сделать все бюджетно? Можно конечно было бы просто сделать и напечатать на том же 3D-принтере корпуса, разместить все компоненты, выгнуть из металла контакты и картонные карточки вложить в специальные углубления, но… Решение было найдено более «изящное» и это…
… Простые зажимы для бумаги. Купленные в ближайшем магазине канцтоваров. Я использовал шириной 25 мм. Также мне понадобились магнитики, которые можно заказать на куче сайтов, диаметром 5 мм и толщиной 2 мм. И немного радиодеталей и проводов.
Первая задача (и проблема) которую надо решить, это сделать зажим проводящим. Он покрыт краской, которая увы ток не проводит. Здесь предстояла механическая работа. Берем наждачную бумагу (или надфиль) и «отшкуриваем» краску с торцов зажима.


Затем «зажимаем» шкурку и снимаем краску с внутренней стороны (нам достаточно получить контакт в зоне касания «лапок» зажима).

Помещаем в каждый зажим внутрь магнит. Полярность не имеет значения, так как магниты небольшие и если вы не угадали с взаимной полярностью, они просто чуть подвинутся внутри зажима и притянут противоположный в любом случае.

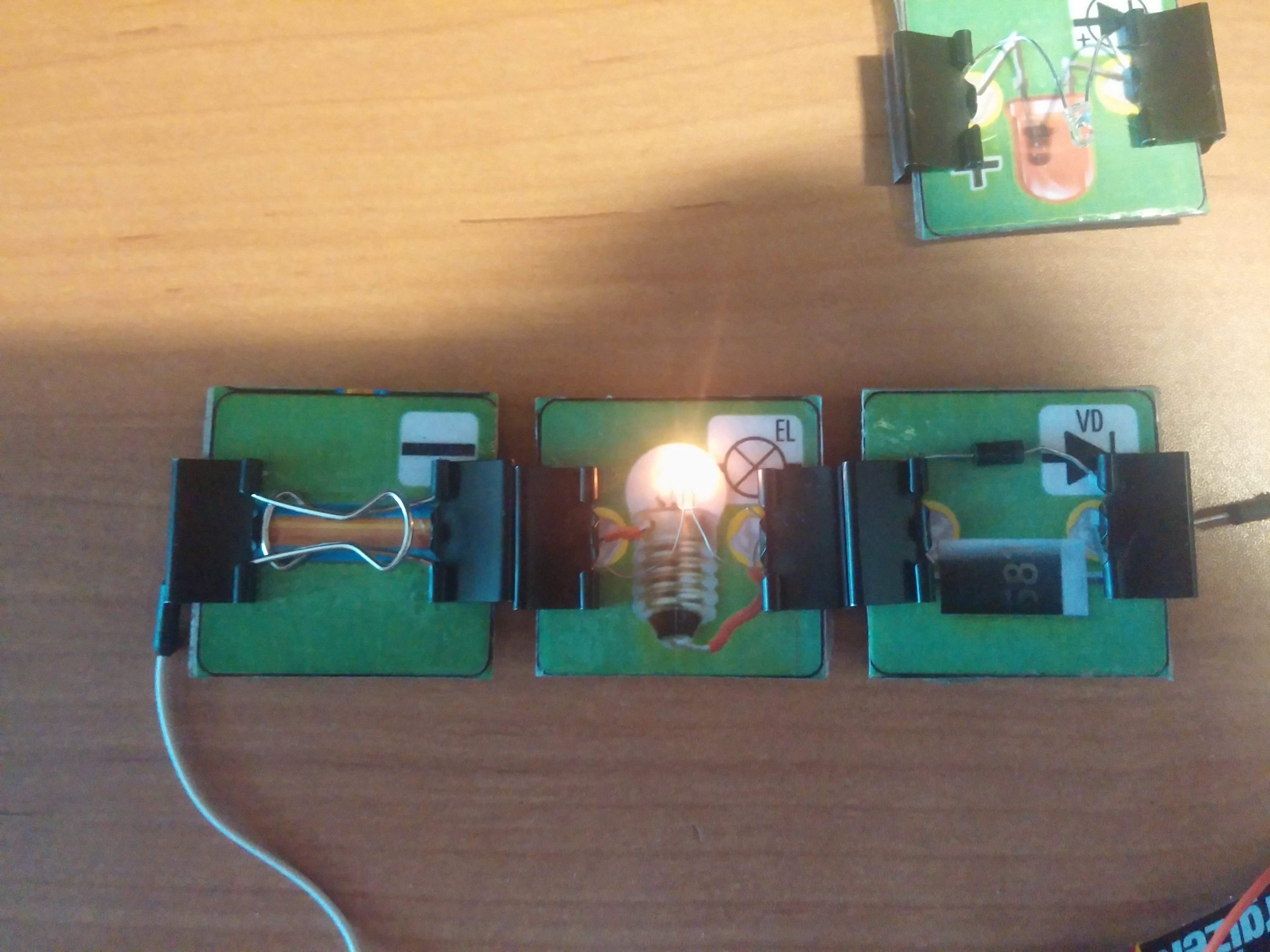
После этого можно собирать наш первый «электрический» квадратик. Для этого берем карточку из игры (на фото ее прототип, но реальная игра такая же, только гораздо красивей) и зажимаем его с двух сторон сделанными ранее «контактами» вместе с нужной радиодеталью (лампочкой, диодом, резистором или светодиодом).

После этого «убираем» металлические скобы и получаем готовый компонент.

Для получения блоков проводников можно «зажать» кусочек провода, но можно обойтись проще — достаточно не убирать пружинные скобы зажимов и просто законтачить их друг с другом.

Причем данная схема как оказалось работает в качестве выключателя — достаточно поднять одну скобу, и цепь разрывается. Таким же образом делам Т-образный элемент. Для пересечения всех четырех сторон и скрещивающихся проводников лучше будет взять и «зажать» отрезки провода (для пересечения без изоляции, а для скрещивающихся с изоляцией посередине).
Аналогично можно сделать переключатель.

Потратив немного времени, создаем нужное число компонентов. Осталось подключить цепь к источнику питания. Клеммы также делаем из зажимов (или можно просто «примагнитить» проводники к крайним контактам).

Можно использовать батарейные отсеки, а можно просто соединить батарейки через те же магниты.
У нас получился простой конструктор электрических схем. Для чего его можно использовать? К примеру для разбора работоспособности схем из настольной игры. Я ранее писал, что «движок» игры имеет определенные ограничения и мы получаем прекрасный способ все проверить.

Также можно показать влияние полярности подключения полупроводников на их работу, влияние резистора на работу компонентов и другие основы построение электрических схем.
Можно также показать работу параллельного и последовательных соединений.

Кто то может возразить, что это слишком просто и не интересно, но для детей будет важен сам процесс создания такого конструктора и превращение «бездушной картонки» в работающую электрическую схему. А далее уже можно переходить к макетным платам и более сложным схемам, а настольную игру вернуть в изначальное состояние и использовать как увлекательный логический абстракт, в который интересно «зарубиться» время от времени как детям, так и взрослым.
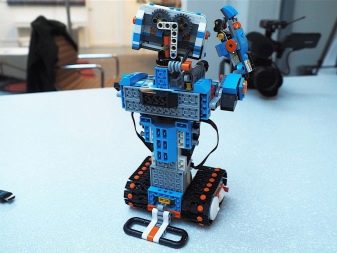
«Железяка 1» — робот из «обычного» металлического конструктора

Собрать робота из отечественного металлического конструктора, который многие из моего поколения помнят еще с уроков школьного труда в детстве. Возможно ли? Такой «вызов» я себе поставил, заодно решив посмотреть как возможность данного предприятия, так и для прощупывания почвы создания хоть и не очень сильного, но конкурента импортных наборов, занимающих на российском рынке монопольную долю. Предупрежу, что далее будет много фотографий и текста и что я покажу только как создать управляемую тележку с микроконтроллером, которую вы самостоятельно сможете дооснастить любыми датчиками.
Идея, с одной стороны, разрешимая — зная, что у импортных аналогов «нашего» конструктора, к примеру компании Merkur, есть двигатели и управление можно было ожидать успеха и в этом случае. С другой стороны — у российского конструктора шаг все-таки метрический, а вся электроника и детали увы «заточены» под дюймовый стандарт. Причем задача стояла не использовать по возможности никакие крепежные элементы, кроме деталей конструктора.
Для этих целей на один из Новых Годов я «подарил» себе набор «Грузовик и трактор». Набор конечно же был отобран сыном сразу после появления дома, трактор собран, потом им играли некоторое время, и уже после можно спокойно было разобрать конструкцию обратно на запчасти.

Также из электронно-китайских запасов были взяты мотор-редукторы с колесами и дисками с прорезями для энкодера — 2 щт, самый дешевый драйвер двигателя — 1 шт, блютус-адаптер HC-06 — 1 шт, энкодеры — 2 шт, макетная плата 17x10 — 1 шт, провода для макетной платы, перемычки, а также плата Arduino Leonardo.
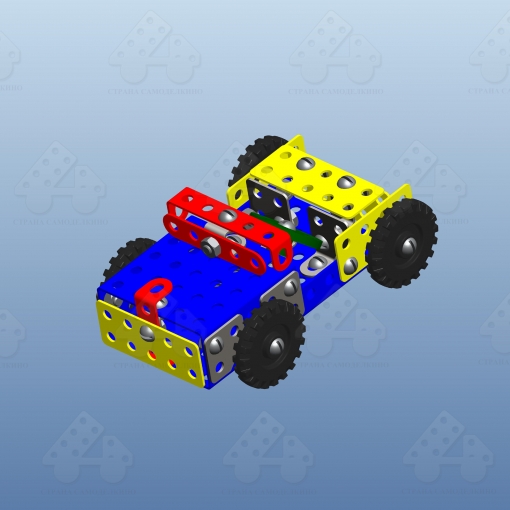
Но вернемся к деталям — встал вопрос, а что делать? Было решено построить для начала четырехколесную тележку с двумя независимыми мотор-колесами, энкодерами, блютус и управлением со смартфона. В дальнейшем эту тележку планировалось дополнить датчиками и сделать автономной и управляемой по заданной программе.
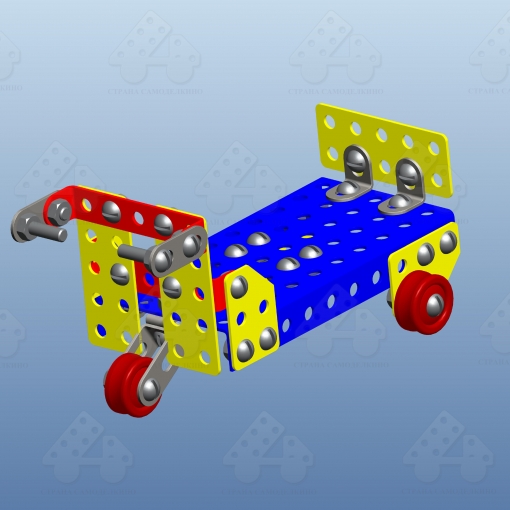
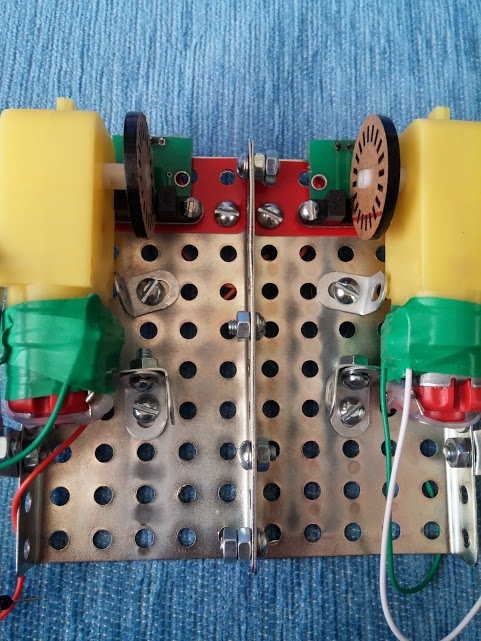
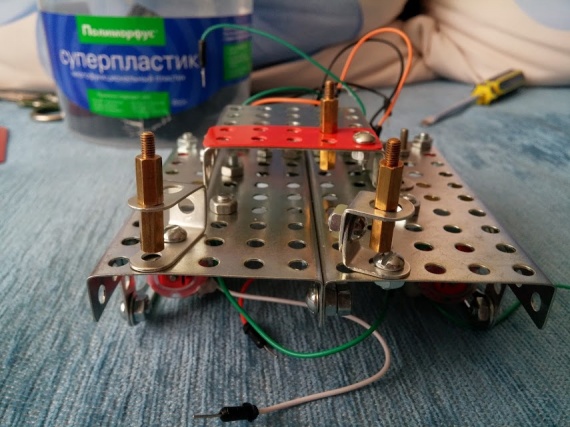
После некоторого времени кручения железяк конструктора и прикидывания куда и что разместить, родилась следующая конструкция. Собираем основание тележки с мотор-редукторами и энкодерами.
Собираем основание тележки с мотор-редукторами и энкодерами.
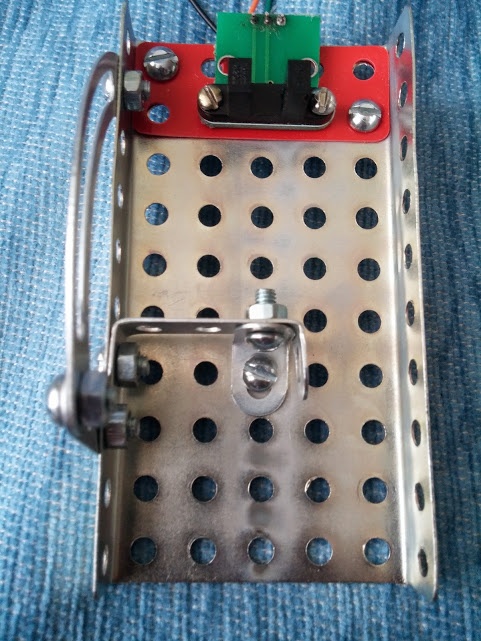
Основание тележки мы собираем из двух симметричных половинок. Я буду использовать терминологию для деталей из официальной инструкции набора. Сначала прикрепляем к большой панели пластик 50x20 двумя винтами. Это будет изолирующее основание для энкодеров. Вы можете их не ставить — для управления по блютус или базовых задач по робототехнике они не обязательны.

К боковой стороне прикручиваете две детали — планку сегментную 2 и планку с тремя отверстиями.

Далее устанавливаете скобу I и уголок I как показано на фото. Энкодеры прикручиваете винтами с гайками М3 (у меня под рукой были только M3x15). Скобы чуть отгибаете. Наклон будет нужен для размещения мотор-редуктора в правильном положении.
Устанавливаете мотор-редуктор с припаянными проводами и заизолированной зоной пайки, так чтобы он попал выступом в паз на сегментной планке и закрепляете на ней же винтом с гайкой M3. У меня не было длинного винта M3 длиной 25-30 мм, поэтому я использовал просто винт M3x15, который вставил в отверстие мотор-редуктора. Обращаем внимание на энкодеры, если вы их поставили.
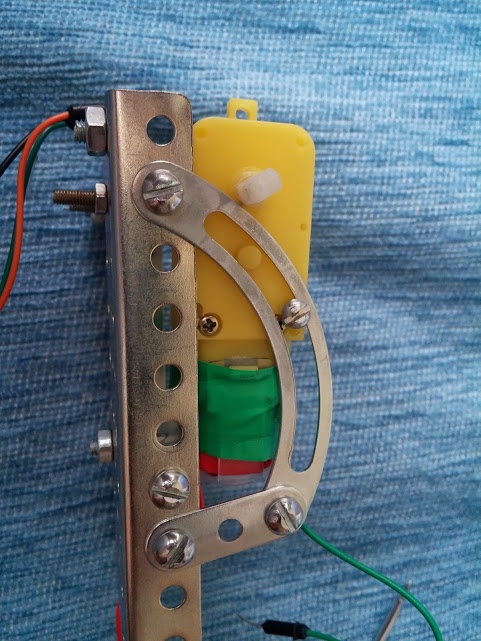
Фиксируем мотор уголком I и зеркально собираем вторую половину основания и скрепляем их между собой.
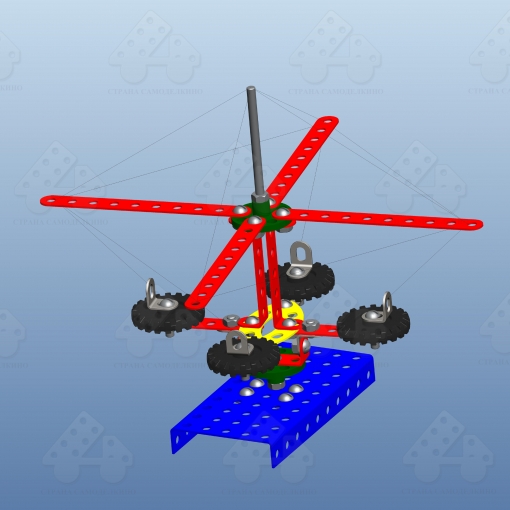
Колеса
Наша тележка пока имеет только два колеса. Так как мы не планируем делать балансирующего робота, то ей надо добавить еще точки опоры. Вариантов было несколько — третье колесо, два колеса на одной оси или колеса на независимых осях.
От одного колеса сразу отказались — сделать шарнир нужного свойства из оставшихся деталей было проблематично. Решил сделать конструкцию с независимыми колесами (на фото показана тележка уже со смонтированной электроникой, так как сначала собрал неудачный вариант с колесами на общей оси и в итоге переделывал конструкцию уже после сборки всего робота).
Для сборки одной оси нам понадобятся шпилька L=75M4, колесо большое, уголок I, диск большой и винты с гайками. Главная задача при сборке — ось должна быть закреплена неподвижно и законтрена вторыми гайками, а колесо, наоборот, должно вращаться свободно с небольшим люфтом.

Электроника
Переходим к электронике. Так как у нас экспериментальный робот, то все соединения мы будем делать на макетной плате, а также использовать для управления плату Arduino Leonardo.
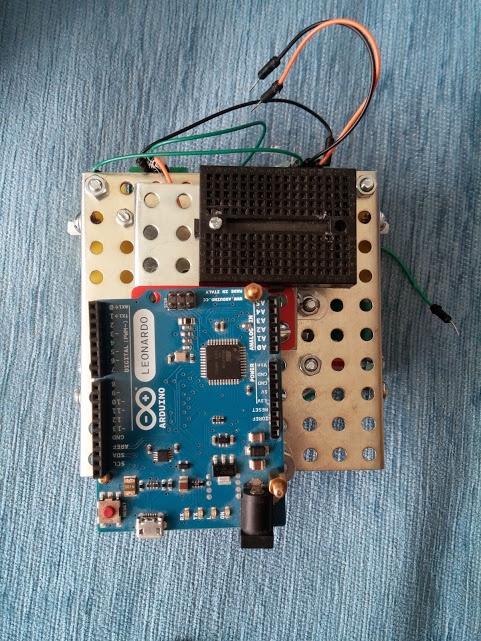
Из Панели, 4-х Уголков I, пластика 50x20, Скобы большой и 6 стоек под плату 10x3 (можно использовать три стойки и три винта M3x5) сооружаем каркас для установки макетной платы и платы Arduino.
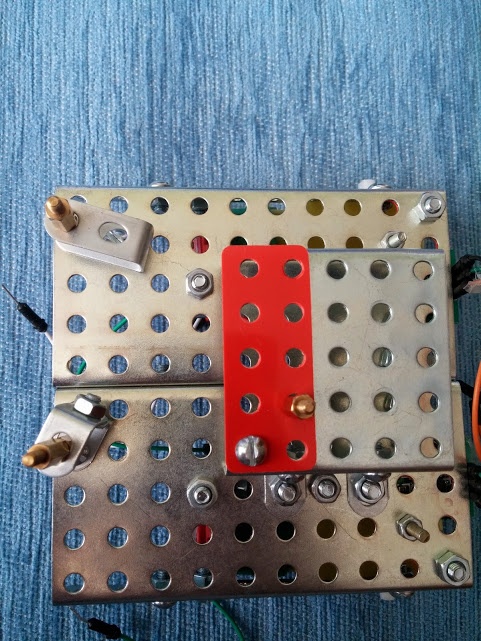
Далее закрепляем на двусторонний скотч макетную плату 10x17 со сдвигом, так как нам надо будет разместить драйвер двигателя. Если у вас драйвер двигателя с прямыми ножками подключения, вы можете не делать такой сдвиг — главное, чтобы после установки платы Ардуино у вас было место для установки остальных плат. Прикручиваем плату Arduino (я использовал опять же стойки, так как у меня их был избыток, а гаек M3 недостаток.
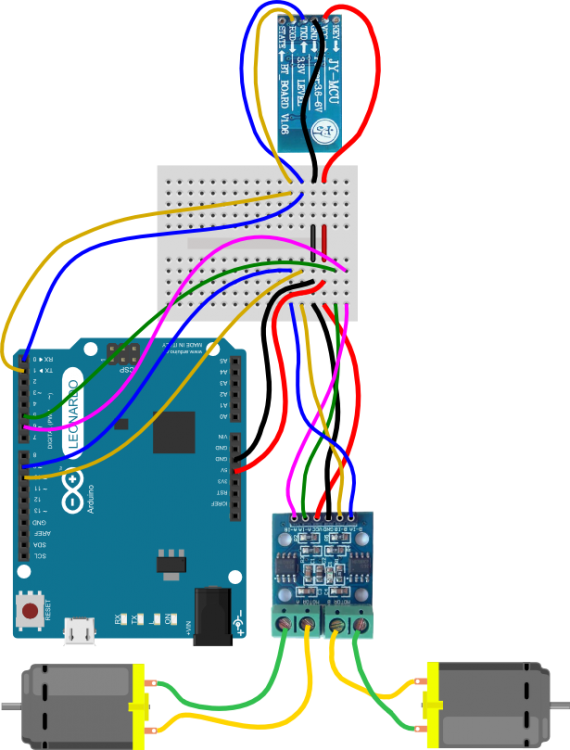
Устанавливаем на макетную плату Bluetooth модуль, плату драйвера и подключаем все провода к макетной плате и плате Arduino по схеме. Энкодеры можно подключить к питанию и Arduino, но я пока их не использовал.
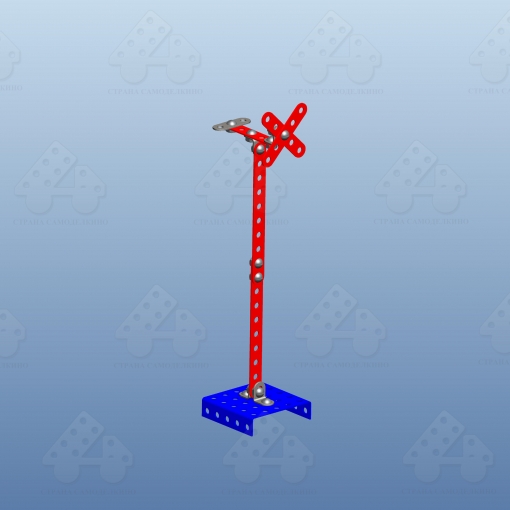
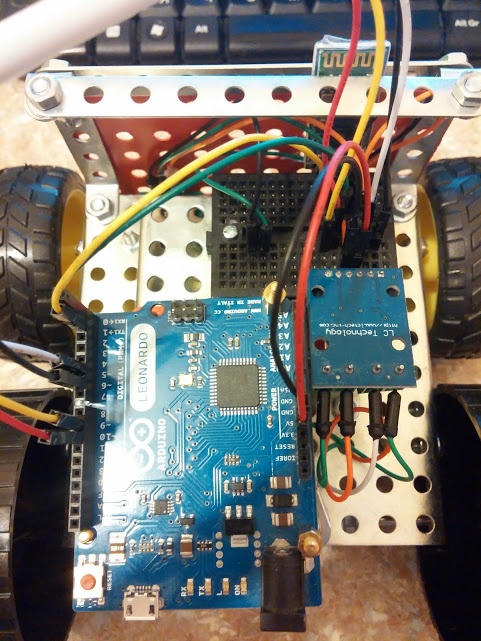
После решил защитить провода и зафиксировать блютус модуль от разбалтывания, поэтому собрал вот такую «защиту» для передней части нашего робота (у нас передние колеса ведущие). Для этого использовали детали: Скоба II — 2 шт, Планка с 10 отв. — 2 шт., Пластик 75x100.
Программное обеспечение
На деле это самая простая часть — в Интернет полно примеров, как заставить такую тележку «бегать» управляя ей со смартфона или другим способом. Для этого используется передача через Serial порт команды в виде буквы и ее последующая обработка. Используя данные производителя платы драйвера двигателей по разводке и таблицу истинности легко задать скетч для Arduino. Конечно, легко на словах — я потратил 4 часа, пытаясь найти проблему работы скетча. Как оказалось для Arduino Leonardo (что кстати написано в документации на сайте) надо использовать Serial1, вместо простого Serial. Поэтому если у вас плата, отличная от Leonardo, используйте нужную подпрограмму для вашей платы (для UNO, к примеру замените все Serial1 на Serial в тексте). Сам код можно найти по ссылке.
Посмотрев код видно, что мы используем стандартную раскладку WASD для движения и T для остановки.
После того как зальете программу в плату, проверьте что моторы подключены правильно и крутятся в нужную сторону, открыв терминал в Arduino IDE и передавая символы команд. Также можете поэкспериментировать со значением PWM.
Теперь приложение для Android. Тут тоже все достаточно просто: мы воспользуемся конструктором приложений MIT AppInventor 2 и создадим вот такую программу. В ней мы используем события TouchUp и TouchDown к элементам управления, передавая символ движения при его касании и остановки при отпускании.


Вы можете установить на смартфон специальное приложение для отладки или сформировать пакет для установки на Android смартфон, подключить к тележке батарею (я использовал внешний аккумулятор для смартфона), подключить bluetooth устройство (HC-06 в моем случае) и наслаждаться тем, что вы сами создали радиоуправляемую тележку.
А далее дело за вашей фантазией по превращению в робота. Можете поставить ультразвуковой датчик расстояния и сделать так, чтобы тележка не натыкалась на препятствия. Можете прикрутить фотодатчики и заставить робота ездить по линии. Можете поставить по периметру датчики касания или прикрутить видеокамеру и погрузиться в мир CV. Основа у вас есть, а металлический конструктор не так страшен в создании новых элементов.
Как сделать робота из конструктора?

Конструктивно робот – не просто механический человек-гуманоид, запрограммированный на конкретные функции, например, устойчиво передвигаться, совершать примитивные движения и переносить грузы. Идея робота опирается на вооружённого киборга.



Как сделать робота из большого конструктора?
Для изготовления макета настоящего робота из большого конструкторского набора могут потребоваться следующие детали и функциональные узлы, делающие сложный механизм ценным с точки зрения подвижной и управляемой конструкции, а не просто неподвижной статуей, поставленной в детской или мастерской как элемент технико-дизайнерской роскоши.
В качестве примера – крупногабаритные детали конструктора марки «Полесье», похожего на легендарный LEGO. Отличие первых наборов LEGO от «Полесья» в сравнительной компактности первого: «кирпичи» и другие элементы набора схожи по строению с «Полесьем». Но в «Полесье», в отличие от LEGO, присутствуют внутренние перегородки, разделяющие пространство на отсеки, соответствующие площади размещения конкретного шипа. Эти перегородки позволяют укладывать ряды блоков вполовину по посадочному месту, а не целиком, что позволяет сооружать диагональные «лестничные» переходы, не применяя специальные косые, сглаженные и сгруглённые комплектующие. Те, в свою очередь, содержатся далеко не в каждом из конкретных конструкторских наборов. В данном руководстве используется комплект из не менее чем 200 деталей. Выполните следующие шаги.
Соберите две подошвы (ступни) робота. Потребуется два квадратных яруса блоков, поставленные один на другой.
Надстройте над ними голени и бёдра, используя несколько вышележащих рядов блоков. Ноги почти готовы, для наглядности – например, когда показываете процесс сборки детям – предпочтительно использовать разноцветные и высококонтрастные друг по отношению к другу детали.
Соберите нижнюю часть туловища, расположив ряды блоков друг над другом. Длина и ширина этой части по площади равна площади ног конструкции, расположенной на ширине плеч.
Продолжите надстраивать туловище, меняя цвета. Например, нижняя часть туловища – из голубых, средняя – из красных и жёлтых, верхняя – из розовых и также жёлтых элементов. Оставьте посадочное место для рук робота – в один ряд шипов. Туловище собрано.
Приступите к плечам, параллельно наращивая руки из таких же блоков. Руки обычно направлены вперёд, а не свисают по бокам – если это боевой робот, а не производственная его модель.
Соорудив туловище и шею, закончите сборку рук. Поскольку руки не имеют опоры снизу, то они могут отваливаться. Если бы это был одноразовый конструктор, то можно было бы посадить все соединения на эпоксидный клей, зашкурив все стыки наждачной бумагой для наиболее устойчивого сцепления.
Соберите до конца шею и голову. Для головы используется в основном квадратный массив, состоящий из соединённых в обычную «стенку» блоков. По сути, полученный робот толщиной не более стенки дома, если не считать выступы стоп, рук и конструкции, напоминающей автомат.
Присоедините к рукам сборки, обозначающие, к примеру, автомат и пистолет. На голову конструкции присоедините «пирамидку», обозначающую головной убор. Например, красная верхушка служит отсылкой к краповому берету.
Читайте также: