Как сделать робота из металла
Обновлено: 03.05.2024

Собрать робота из отечественного металлического конструктора, который многие из моего поколения помнят еще с уроков школьного труда в детстве. Возможно ли? Такой «вызов» я себе поставил, заодно решив посмотреть как возможность данного предприятия, так и для прощупывания почвы создания хоть и не очень сильного, но конкурента импортных наборов, занимающих на российском рынке монопольную долю. Предупрежу, что далее будет много фотографий и текста и что я покажу только как создать управляемую тележку с микроконтроллером, которую вы самостоятельно сможете дооснастить любыми датчиками.
Идея, с одной стороны, разрешимая — зная, что у импортных аналогов «нашего» конструктора, к примеру компании Merkur, есть двигатели и управление можно было ожидать успеха и в этом случае. С другой стороны — у российского конструктора шаг все-таки метрический, а вся электроника и детали увы «заточены» под дюймовый стандарт. Причем задача стояла не использовать по возможности никакие крепежные элементы, кроме деталей конструктора.
Для этих целей на один из Новых Годов я «подарил» себе набор «Грузовик и трактор». Набор конечно же был отобран сыном сразу после появления дома, трактор собран, потом им играли некоторое время, и уже после можно спокойно было разобрать конструкцию обратно на запчасти.

Также из электронно-китайских запасов были взяты мотор-редукторы с колесами и дисками с прорезями для энкодера — 2 щт, самый дешевый драйвер двигателя — 1 шт, блютус-адаптер HC-06 — 1 шт, энкодеры — 2 шт, макетная плата 17x10 — 1 шт, провода для макетной платы, перемычки, а также плата Arduino Leonardo.
Но вернемся к деталям — встал вопрос, а что делать? Было решено построить для начала четырехколесную тележку с двумя независимыми мотор-колесами, энкодерами, блютус и управлением со смартфона. В дальнейшем эту тележку планировалось дополнить датчиками и сделать автономной и управляемой по заданной программе.
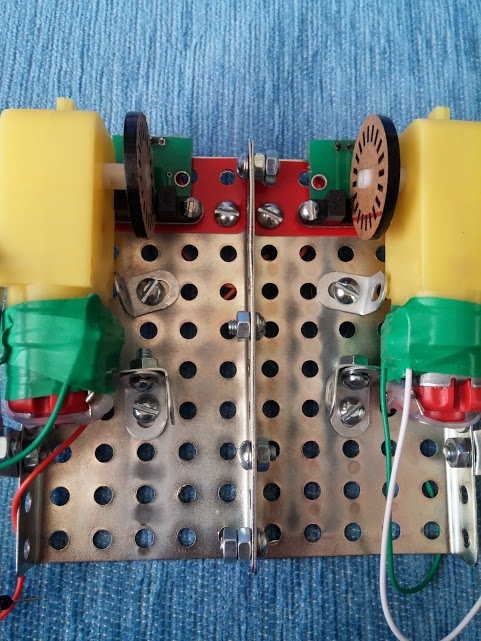
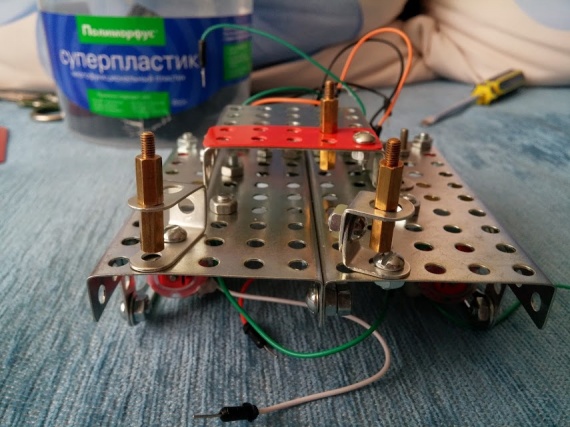
После некоторого времени кручения железяк конструктора и прикидывания куда и что разместить, родилась следующая конструкция. Собираем основание тележки с мотор-редукторами и энкодерами.
Собираем основание тележки с мотор-редукторами и энкодерами.
Основание тележки мы собираем из двух симметричных половинок. Я буду использовать терминологию для деталей из официальной инструкции набора. Сначала прикрепляем к большой панели пластик 50x20 двумя винтами. Это будет изолирующее основание для энкодеров. Вы можете их не ставить — для управления по блютус или базовых задач по робототехнике они не обязательны.

К боковой стороне прикручиваете две детали — планку сегментную 2 и планку с тремя отверстиями.

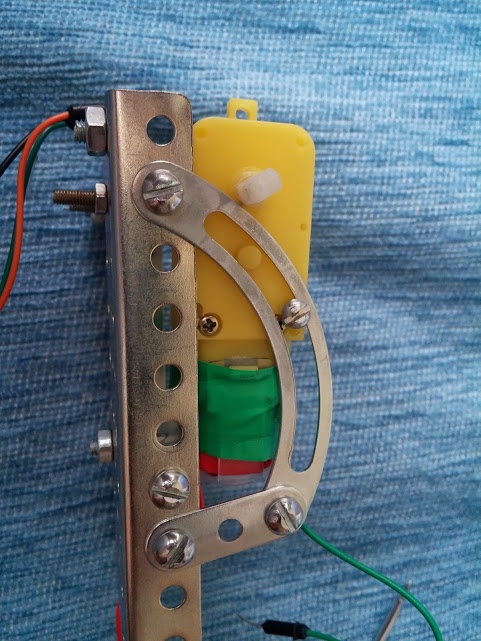
Далее устанавливаете скобу I и уголок I как показано на фото. Энкодеры прикручиваете винтами с гайками М3 (у меня под рукой были только M3x15). Скобы чуть отгибаете. Наклон будет нужен для размещения мотор-редуктора в правильном положении.
Устанавливаете мотор-редуктор с припаянными проводами и заизолированной зоной пайки, так чтобы он попал выступом в паз на сегментной планке и закрепляете на ней же винтом с гайкой M3. У меня не было длинного винта M3 длиной 25-30 мм, поэтому я использовал просто винт M3x15, который вставил в отверстие мотор-редуктора. Обращаем внимание на энкодеры, если вы их поставили.
Фиксируем мотор уголком I и зеркально собираем вторую половину основания и скрепляем их между собой.
Колеса
Наша тележка пока имеет только два колеса. Так как мы не планируем делать балансирующего робота, то ей надо добавить еще точки опоры. Вариантов было несколько — третье колесо, два колеса на одной оси или колеса на независимых осях.
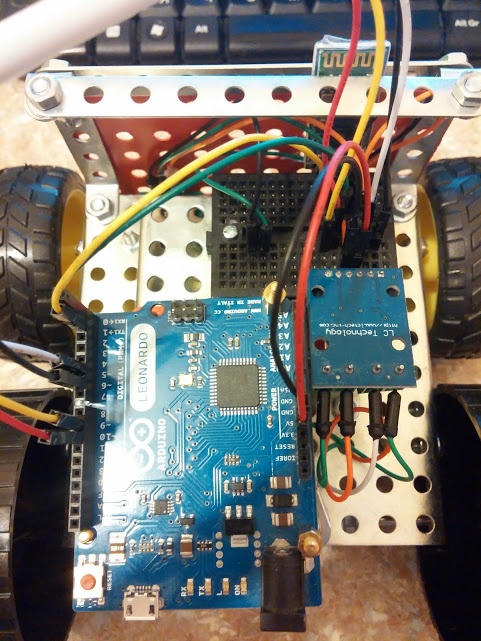
От одного колеса сразу отказались — сделать шарнир нужного свойства из оставшихся деталей было проблематично. Решил сделать конструкцию с независимыми колесами (на фото показана тележка уже со смонтированной электроникой, так как сначала собрал неудачный вариант с колесами на общей оси и в итоге переделывал конструкцию уже после сборки всего робота).
Для сборки одной оси нам понадобятся шпилька L=75M4, колесо большое, уголок I, диск большой и винты с гайками. Главная задача при сборке — ось должна быть закреплена неподвижно и законтрена вторыми гайками, а колесо, наоборот, должно вращаться свободно с небольшим люфтом.

Электроника
Переходим к электронике. Так как у нас экспериментальный робот, то все соединения мы будем делать на макетной плате, а также использовать для управления плату Arduino Leonardo.
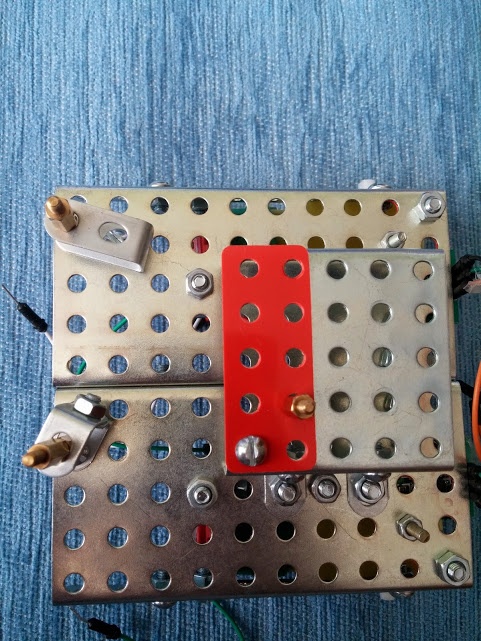
Из Панели, 4-х Уголков I, пластика 50x20, Скобы большой и 6 стоек под плату 10x3 (можно использовать три стойки и три винта M3x5) сооружаем каркас для установки макетной платы и платы Arduino.
Далее закрепляем на двусторонний скотч макетную плату 10x17 со сдвигом, так как нам надо будет разместить драйвер двигателя. Если у вас драйвер двигателя с прямыми ножками подключения, вы можете не делать такой сдвиг — главное, чтобы после установки платы Ардуино у вас было место для установки остальных плат. Прикручиваем плату Arduino (я использовал опять же стойки, так как у меня их был избыток, а гаек M3 недостаток.
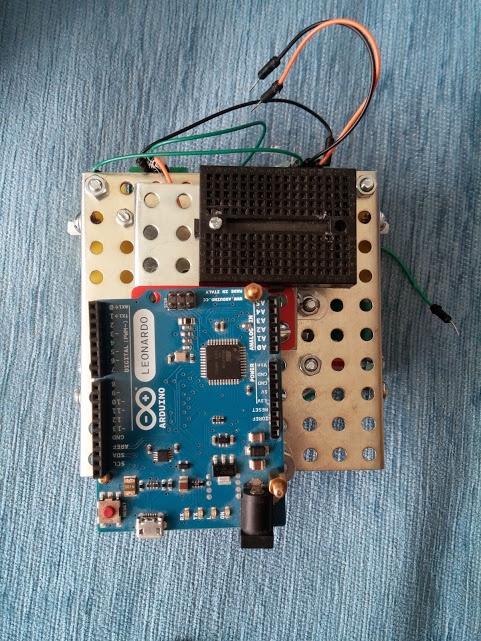
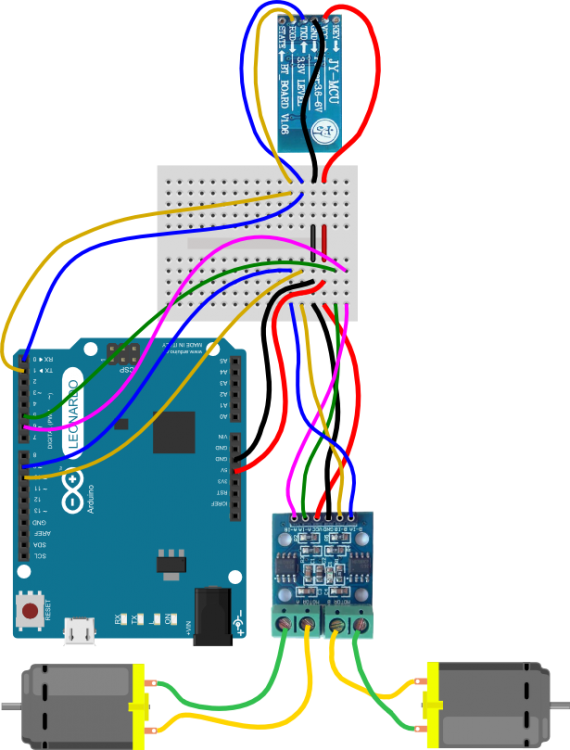
Устанавливаем на макетную плату Bluetooth модуль, плату драйвера и подключаем все провода к макетной плате и плате Arduino по схеме. Энкодеры можно подключить к питанию и Arduino, но я пока их не использовал.
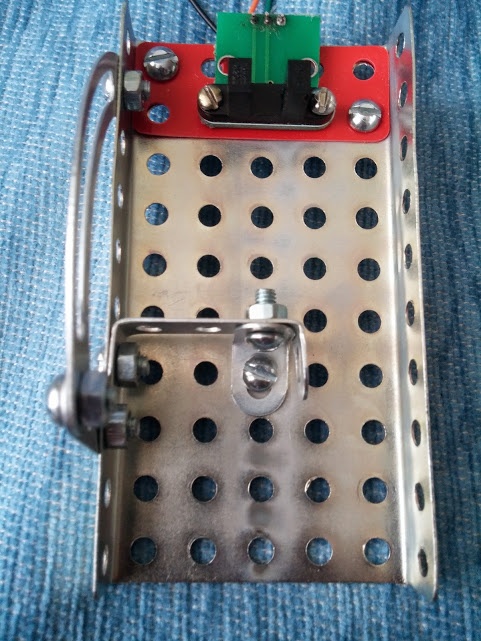
После решил защитить провода и зафиксировать блютус модуль от разбалтывания, поэтому собрал вот такую «защиту» для передней части нашего робота (у нас передние колеса ведущие). Для этого использовали детали: Скоба II — 2 шт, Планка с 10 отв. — 2 шт., Пластик 75x100.
Программное обеспечение
На деле это самая простая часть — в Интернет полно примеров, как заставить такую тележку «бегать» управляя ей со смартфона или другим способом. Для этого используется передача через Serial порт команды в виде буквы и ее последующая обработка. Используя данные производителя платы драйвера двигателей по разводке и таблицу истинности легко задать скетч для Arduino. Конечно, легко на словах — я потратил 4 часа, пытаясь найти проблему работы скетча. Как оказалось для Arduino Leonardo (что кстати написано в документации на сайте) надо использовать Serial1, вместо простого Serial. Поэтому если у вас плата, отличная от Leonardo, используйте нужную подпрограмму для вашей платы (для UNO, к примеру замените все Serial1 на Serial в тексте). Сам код можно найти по ссылке.
Посмотрев код видно, что мы используем стандартную раскладку WASD для движения и T для остановки.
После того как зальете программу в плату, проверьте что моторы подключены правильно и крутятся в нужную сторону, открыв терминал в Arduino IDE и передавая символы команд. Также можете поэкспериментировать со значением PWM.
Теперь приложение для Android. Тут тоже все достаточно просто: мы воспользуемся конструктором приложений MIT AppInventor 2 и создадим вот такую программу. В ней мы используем события TouchUp и TouchDown к элементам управления, передавая символ движения при его касании и остановки при отпускании.


Вы можете установить на смартфон специальное приложение для отладки или сформировать пакет для установки на Android смартфон, подключить к тележке батарею (я использовал внешний аккумулятор для смартфона), подключить bluetooth устройство (HC-06 в моем случае) и наслаждаться тем, что вы сами создали радиоуправляемую тележку.
А далее дело за вашей фантазией по превращению в робота. Можете поставить ультразвуковой датчик расстояния и сделать так, чтобы тележка не натыкалась на препятствия. Можете прикрутить фотодатчики и заставить робота ездить по линии. Можете поставить по периметру датчики касания или прикрутить видеокамеру и погрузиться в мир CV. Основа у вас есть, а металлический конструктор не так страшен в создании новых элементов.
Робот-газонокосилка. От чермета до прототипа
Это краткая история о сборке робота-газонокосилки из подручных средств обычным менеджером, а так же о становлении ГИКа, отрицании сингулярности, согласии с его величеством Илоном Маском и борьбы человека с машинами. Пристегните ремни, мы направляемся в атмосферу легкой иронии и непринужденного описания разработки робота-газонокосилки от черного металла до прототипа. Пытливый читатель, добро пожаловать под кат!
Вместо предисловия:
Здравствуйте! Меня зовут Вячеслав Голицын, и я ГИК! Это началось все еще в школе, меня на это подсадили друзья из физмат класса. На переменах, украдкой в туалете и за углом школы мы обсуждали новые гаджеты и схемы для жучков-радиопередатчиков. Я думал просто побалуюсь, но затем я уже не мог соскочить. Электронику, которую я собирался починить, в доме уже никогда никто работающей не видел, во время очередного феерического разгулья мною жестоко был убит магнитофон «Электроника 302». Меня наказали, но я не смог полностью отказаться от своей пагубной привычки, так я стал тайным гиком, но даже в радио-клубе меня за своего не приняли, да, в клубах мало что заметно, из-за пафоса все вверх дном. Когда я обменял свой новый снегокат на учебник А.Марченко и конструктор автомобильного приемника, я понял, что я качусь на ДНО! Меня стали узнавать в лицо на радио-рынках и в магазинах электроники, я читал «Технику молодежи» и посредственные форумы по ночам на dialup'e. Я начал носить очки с простыми стеклами, т.к. меня и так все называли «очкарик». Даже родной отец как-то поставил мне 3 в одноклассниках. Окончательно сорвался когда меня бросила девушка, тут меня понесло… я купил новую паяльную станцию, а мой аккаунт на Алиэкспресс начал требовать крови все большую часть моей скромной зарплаты.
Потом жизнь как-то наладилась… семья, дети, и вот уже несколько лет я в завязке, но каждый день читаю Хабр (теперь Гиктаймс). Я менеджер очень среднего звена, я как все — работаю в офисе. Технического образования у меня, увы, нет, но когда я читаю обзор нового гаджета, мини-компьютера или платы автоматизации в сознании уже формируется огромное количество идей где бы это можно было применить (автоматизацию офисного туалета не предлагать). После недолгого полета фантазии обычно следует заказ и томительное ожидание забугорного чуда чудесного. За время пока долгожданный груз проходит все круги ада сортировочных центров Почты РФ, романтика понемногу из нового образчика современного гения технической мысли улетучивается. Так было и с raspberry pi, arduino, небольшой коробочки с датчиками и проводами. Но тут появилась боль. Имя ей — дача, точнее газон на даче.
Газон косить — не дрова рубить. И не чай пить, и не квесты проходить, и не за пивом ходить. Ну Вы поняли.
Вы спросите: почему газонокосилка, лето ведь заканчивается, а зимы у нас долгие? Не зря ведь в народе говорят: «The winter is coming. ». Возможно, ответ — банальная лень или любознательность, возможно — все вместе, но поддерживать газон в красивом виде — задача не из простых даже при скромных размерах угодий, кои и представлены у вашего покорного слуги. Я решил совместить активное желание познания нового + raspberry pi model B + arduino + чермет + свободную волю, героизм, профессионализм, капитализм, пофигизм и катаклизм.
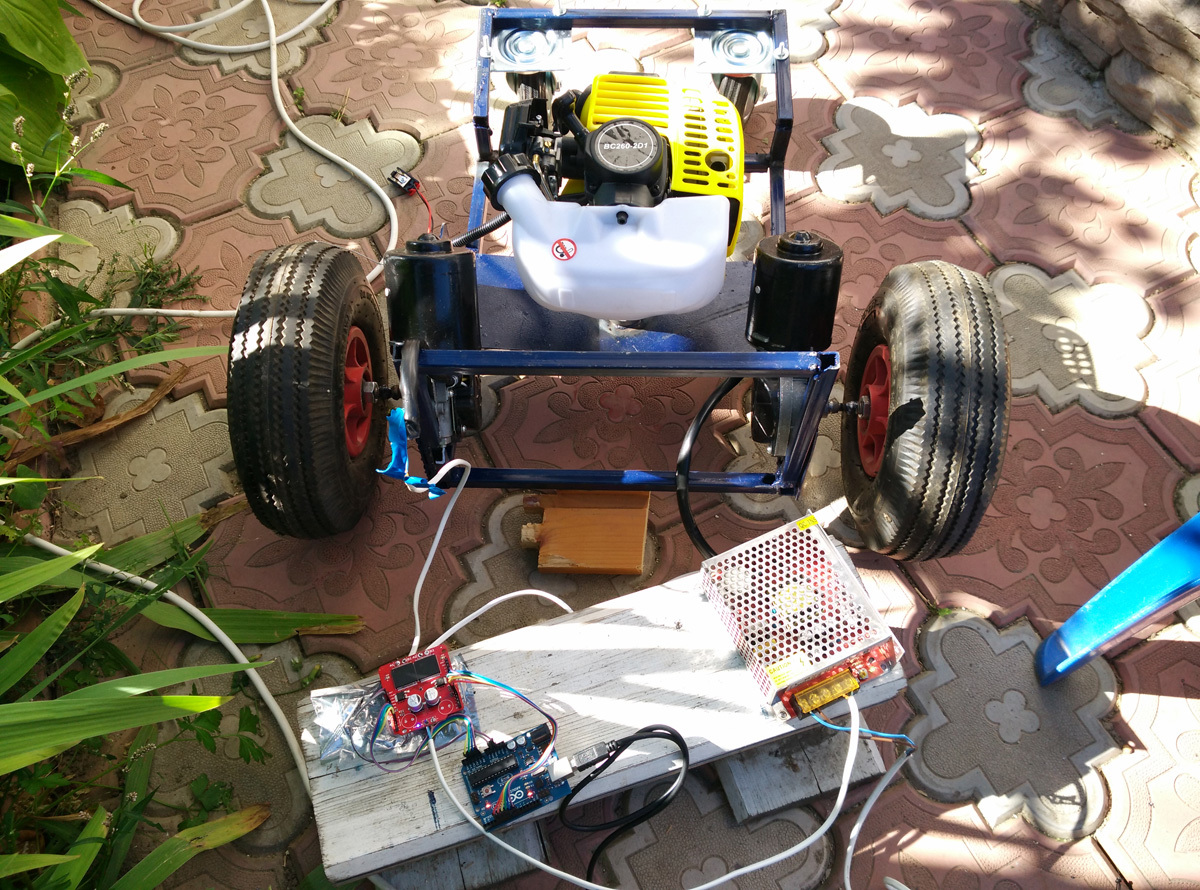
Решение обдумывал долго, рассматривал вариант покупки готовой косилки, но пришел к выводу, что удобнее всего будет сварить тележку самому и прикрепить ДВС от ручной газонокосилки.




Тележка приводится в движение двумя двигателями с редукторами от стеклоочистителя ВАЗ-2108 (импортозамещение в действии). У двигателей не две щетки на коллекторе, как мне было привычно, а три. Я так и не разобрался для чего третья щетка, но тот факт, что один из проводов подключен к корпусу, а двигатели должны были двигаться в разных направлениях для движения вперед, заставил меня изолировать один из двигателей от рамы.

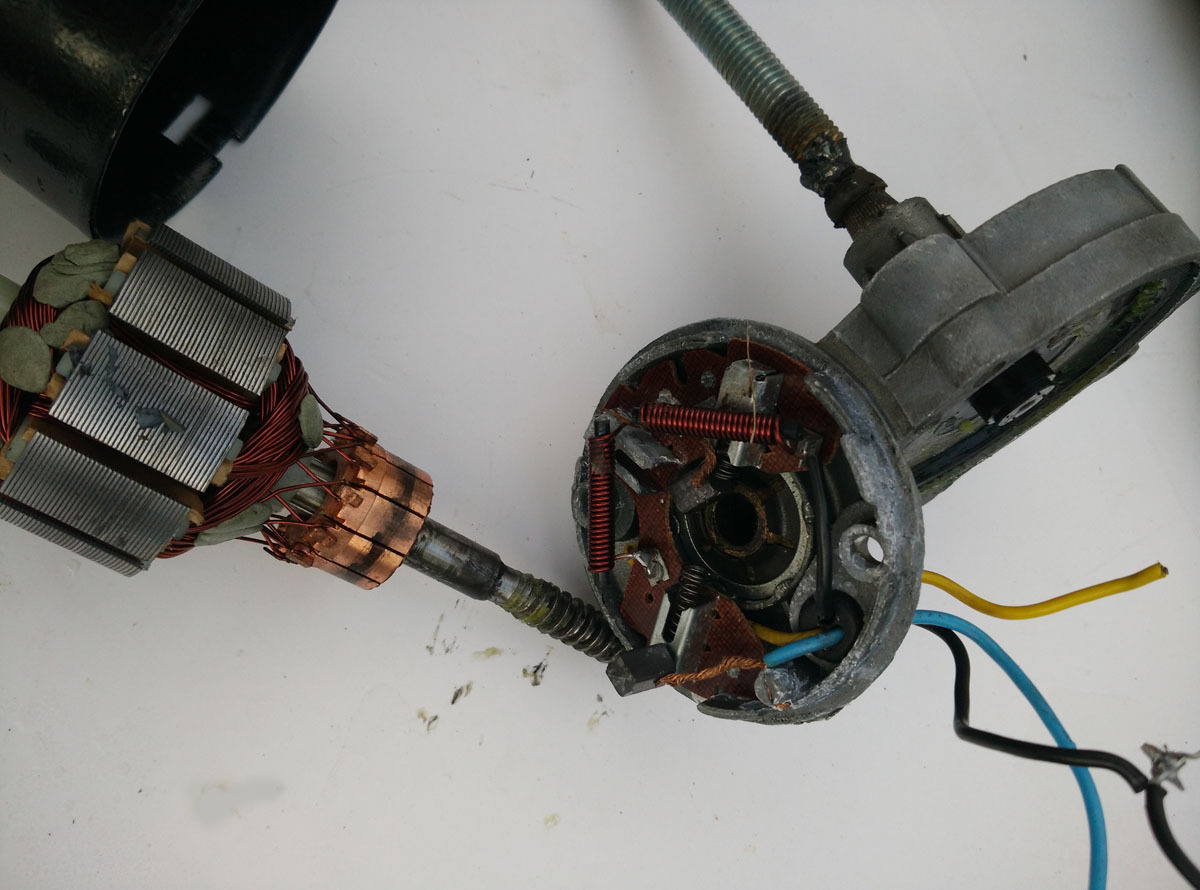
С двигателями сложная история: в попытке понять устройство двигателя, я разобрал один из них — это уже было предвестником того, что двигатель со всеми своими лошадиными силами отправится в кхалосар великого табунщика навечно. В общем, «кто сому глотает — проблем не знает», купил новый двигатель и продолжил велосипедить и быдлокодить.
Источником питания служит аккумулятор на 12В. Ардуино получает питание по USB от малины. Raspberry подключено к USB-свитчу с отдельным питанием, питание на него подается с того же аккумулятора 12в через две параллельные L7805 (пока длится долгое путешествие импульсного DC-DC преобразователя).
Колеса от тележки куплены на строительном рынке. Двигатели были подключены через Monster Motor Shield, но по доброй традиции эта плата приказала долго жить после подсоединения питания к контактам вывода. Вангую холивар в комментариях по поводу того, что с кривыми руками и не стоит начинать ничего делать, но что если сердце просит? В общем сомы грамм и нету драм: оформляем заказ на такую же плату, а пока обойдемся двумя реле, т.к. двигатели на первых парах могут крутиться только в одну сторону. А вообще, учитывая отсутствие необходимости в ШИМ, можно сделать H-мост на основании блока из 8 реле для Arduino. А как к этому относишься ты, дорогой читатель?
Управление двигателями и опрос датчиков (ультразвуковые датчики расстояния и энкодеры на колесах; в версии 1.1: инфракрасные датчики препятствий, кнопка в переднем бампере) осуществляется Arduino mega 2560.
Андурина (моя жена устойчиво продолжает ее так называть) подключена к raspberry pi через USB (Все скромное общение по Serial port). Также к малинке подключена веб-камера (в версии 1.0 для вывода картинки через Motion) и wi-fi свисток.
Логика работы системы. На дворе трава, на траве.
Учитывая, как сильно Илон Маск (да и не только он) предупреждал меня (я таки надеюсь, что ко мне он тоже обращался) об опасности Искусственного Интеллекта, я решил пока его (т.е. ИИ), т.е. ИИего не внедрять в сие изделие, дабы внезапно обрушившаяся сингулярность не перекосила все хвойники на моем участке. На Raspberry pi установлена raspbian OS, OpenCV(которая так правильно не завелась) и подняты вебсервер и FTP. Управление и настройка производятся через ssh. Тот код с OpenCV, который работает на ноуте, никак не хочет запускаться на малинке. После продолжительных танцев с бубном было принято решение оставить внедрение функционала, завязанного на OpenCV для версии 2.0.
На малинке работает Python 2.7 скрипт, который сохраняет в таблице MySQL данные о текущем положении косилки в системе координат (подробнее чуть позже). При обращении по IP косилки выводится матрица (система координат), разбитая на ячейки (для удобства 0.5X0.5 метра, так как это ширина скоса). В таблице разным цветом указаны текущие состояния ячеек.
1. Серый — неизвестно;
2. Зеленый — не скошенная трава;
3. Желтый — скошенные участки;
4. Красный — участки с препятствием;
5. Синий — участок, где находится косилка.
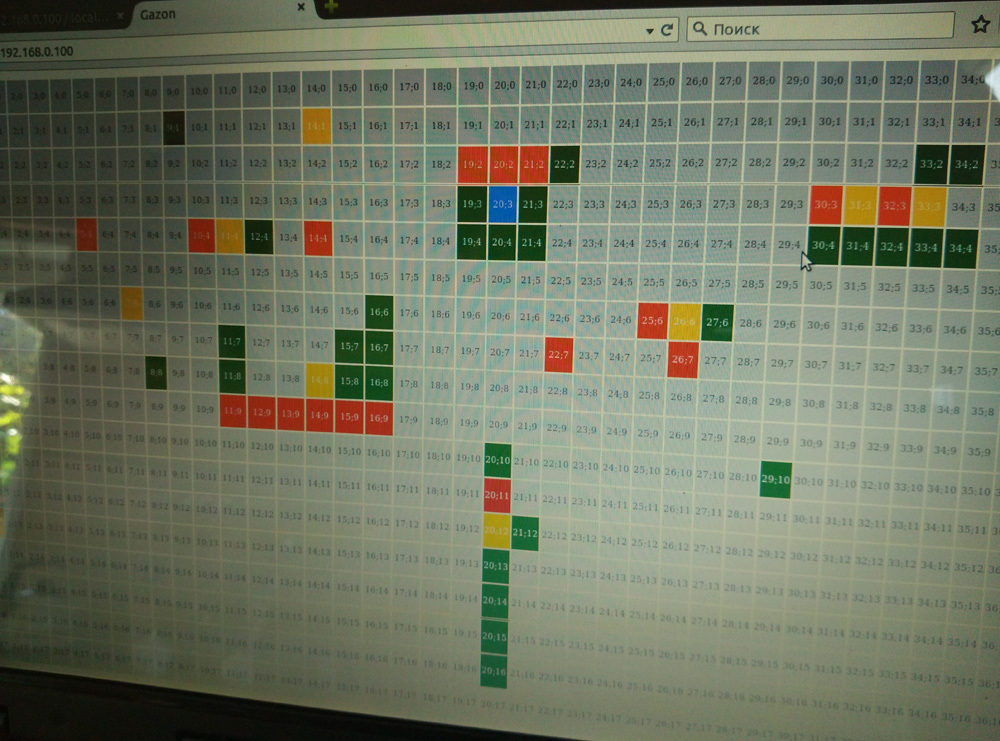
При нажатии на свободный или неизвестный участок возможно перевести его состояние в заблокированный, для того чтобы самостоятельно задать препятствия.
Кроме этого в версии 1.1 на странице должна быть кнопка аварийного отключения, ручка управления топливной заслонкой ДВС и кнопки ручного управления.
Роботы из металлолома (фотографии)

Для того чтобы сделать из металлолома робота (не правда ведь, именно это приходит в голову), нужно, прежде всего, определиться: есть ли у вас целый чемодан со старыми железками: это проволока, пружинка, гаечные ключи, велосипедные цепи, шестеренки, подшипники, старые гнутые алюминиевые вилки и ложки, полосы металла….
Если это все есть, то легче всего будет просто пофантазировать: взять и начать комбинировать между собой детали, просто так, ни о чем не думая. И в какой – то момент вы можете увидеть рождение замысла. А потом станет легче, проект начнет рождаться по мере выполнения.
Второй вариант более обстоятелен: нужно создать эскиз, понять, что именно и в каких комбинациях потребуется, и начать поиск деталей, которые можно найти при желании даже в своем доме.
но предупреждаем, что потребуется слесарная мастерская придачу к навыку, умению и трудолюбию. И тогда вы с успехом сможете сделать вот это:

Рука робота из металлолома
О соединении деталей
Для того чтобы соединять отдельные металлические части, чаще всего пользуются точечной сваркой или пайкой, это придает скульптурам нарядный вид и долговечность.
Как известно, металлы очень плохо склеиваются, и практически не стоит надеяться на то, что вам удастся склеить две металлические детали достаточно жестко. Этому мешает то, что детали довольно тяжелые, их нужно обезжиривать, да и после этого соединения клея с металлом (особенно полированным) является очень ненадежным. Поэтому на первых порах можно посоветовать выполнять проволочные соединения.
Роботы из металлолома на проволочных соединениях могут выглядеть, как обычные поделки: так, например, очень забавно выглядят роботы из скрепок, которые могут украсить вашу кухню.

Своеобразные роботы из металлолома
В том случае, если вы решили сделать более «урбанистического» робота, то вам потребуются следующие инструменты:
- Слесарные тиски;
- Ножовка по металлу;
- Наборы напильников, надфилей;
- Пробойник;
- Пассатижи;
- Кусачки;
- Сверла по металлу и дрель;
- Молоток;
- Паяльник, канифоль, специальные флюсы и припои для лучшего смачивания меди или алюминия.
В том случае, если у вас нет трансформатора для точечной сварки, остановитесь на цветных металлах: алюминий паять гораздо легче, чем сталь, для которой нужно латунный припой и температура до 1000 градусов.
Можно соединять детали с помощью мелких отверстий, в которые вставляются маленькие проволочные «скрутки». Если фиксировать эти скрутки в нескольких местах, то деталь будет неподвижной.
В заключение покажем вам несколько фотографий. Роботы из металлолома своими руками из подручного хлама получаются, как живые.
Роботы из металлолома своими руками
Как видно, использование алюминиевых вилок вместо рук – замечательная идея: если придать им необходимую форму, то можно выразить, пожалуй, даже любой жест и оттенки настроения.
Для регулярного пополнения деталей можно посещать радиорынки, поскольку много различных совершенно никому не нужных железяк можно приобрести именно там, или даже на толкучке.
Велосипедные звонки могут превосходно имитировать панцири насекомых и зловещих крабов, а также роботов – пауков:

Робот-паук из металлолома
В том же случае, если вы полны решимости «замахнуться на великое», то есть, у кого учиться:
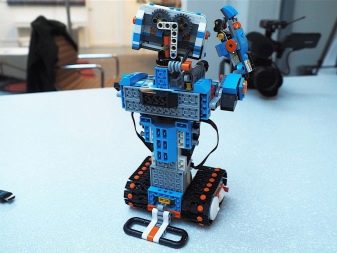
Как сделать робота из конструктора?

Конструктивно робот – не просто механический человек-гуманоид, запрограммированный на конкретные функции, например, устойчиво передвигаться, совершать примитивные движения и переносить грузы. Идея робота опирается на вооружённого киборга.



Как сделать робота из большого конструктора?
Для изготовления макета настоящего робота из большого конструкторского набора могут потребоваться следующие детали и функциональные узлы, делающие сложный механизм ценным с точки зрения подвижной и управляемой конструкции, а не просто неподвижной статуей, поставленной в детской или мастерской как элемент технико-дизайнерской роскоши.
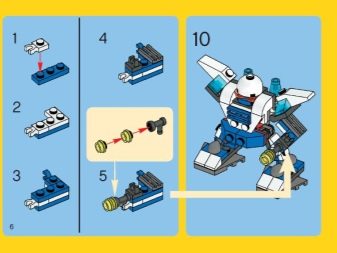
В качестве примера – крупногабаритные детали конструктора марки «Полесье», похожего на легендарный LEGO. Отличие первых наборов LEGO от «Полесья» в сравнительной компактности первого: «кирпичи» и другие элементы набора схожи по строению с «Полесьем». Но в «Полесье», в отличие от LEGO, присутствуют внутренние перегородки, разделяющие пространство на отсеки, соответствующие площади размещения конкретного шипа. Эти перегородки позволяют укладывать ряды блоков вполовину по посадочному месту, а не целиком, что позволяет сооружать диагональные «лестничные» переходы, не применяя специальные косые, сглаженные и сгруглённые комплектующие. Те, в свою очередь, содержатся далеко не в каждом из конкретных конструкторских наборов. В данном руководстве используется комплект из не менее чем 200 деталей. Выполните следующие шаги.
Соберите две подошвы (ступни) робота. Потребуется два квадратных яруса блоков, поставленные один на другой.
Надстройте над ними голени и бёдра, используя несколько вышележащих рядов блоков. Ноги почти готовы, для наглядности – например, когда показываете процесс сборки детям – предпочтительно использовать разноцветные и высококонтрастные друг по отношению к другу детали.
Соберите нижнюю часть туловища, расположив ряды блоков друг над другом. Длина и ширина этой части по площади равна площади ног конструкции, расположенной на ширине плеч.
Продолжите надстраивать туловище, меняя цвета. Например, нижняя часть туловища – из голубых, средняя – из красных и жёлтых, верхняя – из розовых и также жёлтых элементов. Оставьте посадочное место для рук робота – в один ряд шипов. Туловище собрано.
Приступите к плечам, параллельно наращивая руки из таких же блоков. Руки обычно направлены вперёд, а не свисают по бокам – если это боевой робот, а не производственная его модель.
Соорудив туловище и шею, закончите сборку рук. Поскольку руки не имеют опоры снизу, то они могут отваливаться. Если бы это был одноразовый конструктор, то можно было бы посадить все соединения на эпоксидный клей, зашкурив все стыки наждачной бумагой для наиболее устойчивого сцепления.
Соберите до конца шею и голову. Для головы используется в основном квадратный массив, состоящий из соединённых в обычную «стенку» блоков. По сути, полученный робот толщиной не более стенки дома, если не считать выступы стоп, рук и конструкции, напоминающей автомат.
Присоедините к рукам сборки, обозначающие, к примеру, автомат и пистолет. На голову конструкции присоедините «пирамидку», обозначающую головной убор. Например, красная верхушка служит отсылкой к краповому берету.
Что можно сделать из металлического конструктора?
Металлический конструктор в отличие от своих пластиковых собратьев LEGO и «Полесье», а также более универсальных комплектов, где роль металлических деталей отводится лишь винтам, гайкам, болтам, шурупам, шайбам и скобам, представляет собой средство безграничного простора для фантазии.





Как собрать робота?
Робот по сравнению с машиной, танком, самолётом представляет собой наиболее простое из машинных конструкций устройство. Пример пошаговой инструкции выглядит следующим образом.
- Используйте в начале сборки головы две полосковые металлические детали в виде буквы П, соединив их встречно и посередине. Размеры сторон, например, по 2,5 см.
- Голова робота выйдет не в виде коробки, как это обычно бывает с многими моделями, а в качестве подвеса; головой эта конструкция считается лишь условно. Привинтите к концам получившейся Ш-образной конструкции две проушины, выполняющие роль «ушных» зажимов.
- В середине получившейся сборки прикрепите вертикальную полоску стали – она послужит своеобразной шеей.
- К этой полоске привинтите заднюю планку с загнутыми краями со всех четырёх сторон – она послужит спиной (задней частью туловища) робота. Если нет желания прикручивать и переднюю (такую же) панель, то можно для туловища взять пластину типа удлинённый треугольник.
- К плечам – слева и справа – прикрутите руки робота, используя цельные или сборные (двухдетальные) пластины.
- Для закрепления ног прикрутите горизонтальную пластину к нижней части туловища робота.
- Привинтите к этой пластине цельные или сборные ноги, изготовленные по образу и подобию рук. Пластины при этом должны оказаться заметно длиннее.



Робот из металлоконструктора собран. Данный макет собрать очень легко – он послужит первым реальным шагом для новичков, овладевающих построением робототехники, машин и механизмов на основе полностью металлических деталей.



Смотрите видео по теме.
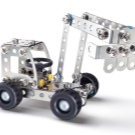
Как построить танк?
Танк, построенный из железного конструкторского набора, соорудить до нескольких раз сложнее: профессиональные макеты, напоминающие советские и немецкие модели танков, насчитывают в себе не менее нескольких сотен деталей. Чтобы макет не просто стоял, а ездил, необходимо оснастить его колёсами. С этой целью берутся готовые наборы, в которых колёса и гусеницы уже присутствуют. Пошаговая инструкция по сборке танка из ненаборных (не из комплекта) деталей заключается в следующем.
- В центр одной из крупных загнутых со всех сторон пластин вставьте посередине длинный винт (от 2 см). Накиньте на него 4 круглые пластины, одним концом наденьте длинную, и затяните всю эту конструкцию при помощи гайки.
- По бокам с помощью болтов привинтите длинные уголки.
Потребуется несколько болтов, чтобы окончательно закрепить макет танка.



Данная модель – слишком примитивная: ей не хватает многих запчастей. К примеру, макет пушки стоило бы посадить на втулку с пружиной, чтобы ствол импровизированного орудия не раскачивался самопроизвольно. Для того чтобы конструкция ездила, по бокам прикрепляют по 4 ведомых колеса – с каждой стороны. Ведущие (направляющие) колёса ставятся спереди и сзади – с боковых сторон танка, а на них натягивается резиновая гусеница. Сделать гусеничный ход, который реально передвигал бы боевую машину, невозможно, используя лишь жёсткие, неподвижные и не вполне доработанные конструкции. И это минимальные доработки – без них макет танка не считался бы реалистичным. Скорее он походил бы на брошенный на металлолом остов машины, утратившей былую боеспособность.



Эта упрощённая схема хороша для детей, которые только начали ознакомление с образцами военной техники. Большую реалистичность ствол орудийной башни танка обретает, когда вместо длинной полосы стали устанавливают металлическую трубку или даже кусок более толстостенной трубы (с толщиной стенок до 1 мм). Но главная задача выполнена – остов танка собран из деталей от детского конструктора, произведённого из металла, а не из пластика.

Далее смотрите вариант сборки танка из металлического конструктора.
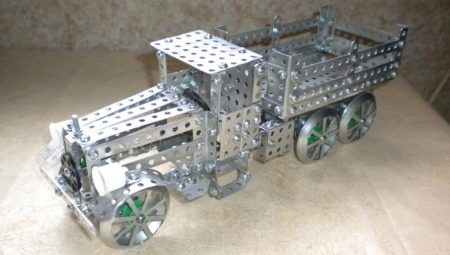
Сборка других моделей
Из металлического конструктора можно сработать не только танк или робота. Большое количество моделей ретроавтомобилей довоенных и послевоенных периодов XX века побуждает юных экспериментаторов воссоздать реалистичный макет «Форда», «Мерседеса» или советского «Москвича» тех, первых поколений. Впрочем, и современные машины в умелых руках, к примеру, «Лада-Приора» с не меньшим успехом копируются в миниатюре.


Все макеты являются поделками, но при должном старании их можно моторизировать, навесить на них источник автономного питания (перезаряжаемый аккумуляторный элемент), оснастить подсветкой, программным микроконтроллером. Высший пилотаж – радиоуправление по Wi-Fi или Bluetooth. Но начнём с простого. Пошагово процесс сборки машины может выглядеть следующим образом.
- Две загнутые с двух сторон пластины, например, 5х7 см, соедините между собой по центру сверху – с помощью перемычки.
- С одного из торцов двойной пластины по центру установите уголок-перемычку, и привинтите на другой его конец другую пластину, поперечную. Размер последней может достигать, к примеру, 5х1,5 см.
- На продольные боковины установите колёса. Осями для них служат длинные винты, к примеру, М-3 длиной в 7-8 см. Закрепите передние колёса на осях при помощи гаек. Оси должны проходить сквозь крайние свободные отверстия боковых загибов основных пластин.
- Перед закреплением задних колёс просуньте их оси сквозь две дополнительные пластинки 5х1,5 см – такие же, какая была установлена спереди. Убедитесь, что они стоят вертикально. Затяните задние колёса, чтобы пластинки не болтались.
- Ближе к середине основной платформы (днища машины) установите одиночные боковые перекладины. Они должны оказаться вдвое уже задних, а их высота должна совпадать с высотой прежних.
- Установите крышу – третью большую пластину. Все соединения по-прежнему фиксируется гаечно-винтовыми креплениями.
- Проверьте и затяните все гайки.
Полезно подкладывать под гайки пресс- и гроверные шайбы: сначала на винты надеваются первые, затем – вторые и, наконец, устанавливаются и затягиваются сами гайки.



Впоследствии машинку можно доработать, обшив её одиночными пластинками. Но эта стадия скорее относится к финальному оформлению, так как несуще-ходовая конструкция уже собрана.
Если дети почувствовали тягу к дальнейшему творчеству, то можно продолжать оснащать собранные модели, заменив, к примеру, «намертво» затянутые ступицы подпружиненными креплениями, ввернув внутрь роликовые подшипниковые комплекты. Машинка будет не стоять, а уверенно ездить; по ходу доработки выравнивается возможная кривизна. Далее в машинку устанавливаются моторчик, аккумулятор, выключатель, светодиодная подсветка – и простая поделка превращается в полноценную, способную преодолевать большие расстояния модель.





О том, как сделать машину из металлического конструктора, смотрите в следующем видео.
Читайте также: