Т 1000 жидкий металл
Обновлено: 17.05.2024
Т-1000 — персонаж кинофильма «Терминатор-2: Судный день». Робот-терминатор, прибывший из будущего убитьДжона Коннора, противостоит терминаторустарой модели. Роль исполняетРоберт Патрик.
Содержание
На время событий второго фильма— самая последняя модель терминатора, созданная Скайнетом. Существует в качестве прототипа, в единственном экземпляре. Создан из жидкометаллического сплава, по совершенно иному принципу, чем предыдущие модели терминаторов с металлическим эндоскелетом. Т-1000 не подвержен механическому разрушению, его повреждённые части быстро восстанавливаются. Согласно дополнительному разъяснению в новеллизации фильма, каждая молекула запрограммирована на соединение с основной массой в радиусе до 14 км. [1] Огнестрельное оружие и взрывчатые вещества против него оказываются бесполезными, они лишь способны на короткое время вывести его из строя. При попадании пули он подвержен баллистическому шоку — кратковременному замедлению реакций и подвижности. Способен принимать различные формы, миновать преграды, просачиваясь через отверстия. Конечности служат холодным оружием, могут принимать форму лезвий или крюков.
Пластичность позволяла ему достичь качественно нового уровня для внедрения в человеческое сообщество. Он может копировать внешний вид людей (лицо, фигуру и одежду). Однако для этого ему необходим физический контакт с копируемым объектом.
Чувствителен к сверхнизким температурам, под воздействием которых становится хрупким и теряет подвижность. После воздействия жидкого азота его механизм поддержания формы оказался немного нарушен. (На заводе его ноги и руки стали самопроизвольно принимать структуру поверхности, на которую они опирались. Хотя, скорее всего, это было следствием перегрева). Попав в расплавленный металл, он, согласно официальному разъяснению, был уничтожен из-за того, что молекулы не могли взаимодействовать друг с другом. [2] Согласно замыслу сюжета фильма, Т-1000, в силу особенностей принципов его работы не поддавался полному контролю и программированию, и не мог, в отличие от терминаторов серии Т-800 в автономном режиме, быть переключённым в режим выполнения задания без самообучения. Свободная воля терминаторов серии Т-1000, по замыслу создателей фильма, воспринималась Скайнетом как потенциальная угроза.
Т-1000 прибывает из2029 в1994/1995 год [3] , чтобы убитьДжона Коннора. Копирует на себе форму полицейского и постоянно поддерживает этот облик, чтобы получить свободу действий. Находит адрес Джона в полицейском компьютере, настигает самого Джона в галерее игровых автоматов. Не сумев убить Джона, возвращается к нему домой и убивает его опекунов, копируя его приёмную мать. Затем предвидит его прибытие в лечебницу кСаре Коннор — настоящей матери Джона— и сам отправляется туда, чтобы принять её облик и устроить засаду. Джону и защищавшему его терминаторуТ-800 удаётся спасти Сару и уехать из больницы. Вновь настигает Джона, Сару и терминатора, когда их осаждает полиция в офисе корпорации «Кибердайн Системс». Захватывает полицейский вертолёт, в итоге настигает жертв на металлургическом заводе. Гибнет, упав в расплавленный металл.
Помимо «Терминатора-2» Роберт Патрик сыграл Т-1000 ещё в трёх фильмах. ВТерминаторе-2 3-D — короткометражном сиквеле фильмаТерминатор 2: Судный день, снятойДжеймсом Кэмероном для стерео аттракциона (1996). И в видекамео в картинах «Последний герой боевика» (1993) и «Мир Уэйна» (1992).
Джеймс Кэмерон изначально хотел, чтобы жидкого робота сыграл рок-музыкантБилли Айдол, но серьёзная авария на мотоцикле заставила музыканта отказаться от съёмок [4] .
В комментариях к фильму на DVD, сценарист и режиссёр Джеймс Кэмерон описывает его выбор Роберта Патрика, как желание создать персонажа преднамеренно отличного от оригинального Терминатора в исполнении Арнольда Шварценеггера. Я хотел найти того, кто будет хорошим контрастом к Арнольду. Если 800-я серия является своего рода танк, то 1000-я серия должна была бытьPorsche— Комментарии Джеймса Кэмерона на DVD . Первоначально, он видел в этой роли актёраМайкла Бина, который сыгралКайла Риза в первом фильме, с объяснением, чтоСкайнету удалось клонировать тело Риза и использовать его для нового Терминатора. Кэмерон в конечном итоге отказался от этой идеи, решив что это покажется зрителям слишком запутанным.
За компьютерные спецэффекты отвечала компанияIndustrial Light & Magic, а за механические—Stan Winston Studio (которые также создали механический каркасT-800). Согласно книге «The Winston Effect: The Art & History of Stan Winston Studio» из 15 минут экранного времени, в течение которых демонстрировались способности робота к трансформации и самовосстановлению, только 6 были сделаны с участием компьютерных эффектов. Остальное было создано с помощью новейших кукол, протезов и грима.
Визуальные эффекты, используемые в фильме для создания Т-1000, позволили фильму выиграть«Оскар» за лучшие визуальные эффекты [5] .
Технологии, использованные для изображения Т-1000, стали новым шагом в применении компьютерно-генерируемых образов в кино, «Терминатор 2: Судный день»— один из первых фильмов с использованием технологииCGI.
О жидком металле замолвите слово. Мысли об аппаратной и программной реализации Т-1000
Если вы — представитель моего поколения и еще помните, что такое «ждать неделю, пока будет этот фильм по РТР» — то, вероятно, вас в детстве тоже интересовал вопрос «Как уничтожить Т-1000». Еще в школе друг сказал мне: «Тебе показали первого Терминатора, чтобы ты понял второго». Сейчас уже не могу сказать с уверенностью, но, наверное, именно терминатор Т-1000 впервые подтолкнул меня к мысли о том, что химия – это надстройка над физикой, а серебристые ковкие и плавкие металлы на самом деле очень разные. Но Т-1000, конечно, не просто жидкий металл. Он воплощает, как минимум, три технологических вектора, о которых мы и поговорим ниже: 1) создание миметических полисплавов («mimetic polyalloy»), 2) химические, электропроводные и теплопроводные свойства жидкого металла, 3) роевая робототехника в экстремально миниатюрном представлении. В этой статье (и, надеюсь, в комментариях тоже) мы постараемся не вдаваться в натяжки и сюжетные ходы франшизы, которая, все-таки, является художественным произведением, а не техническим заданием – и обсудим, какие технологии из проекта Т-1000 по капельке перетекают в реальность.
Остается лишь догадываться, из чего именно состоял Т-1000, так как Т-800 в сцене у телефонной будки и по пути в психиатрическую клинику Пескадеро описывает эту машину Джону Коннору лишь в самых общих чертах. Т-1000 состоит из сплава с адаптивными свойствами, который может не только принимать разнообразную форму, но и имитировать живые ткани и синтетические вещества, а также регулировать собственную плотность и вязкость. Скорее всего, минимальная фундаментальная единица (капелька) Т-1000 очень невелика. Возможно, каждая молекула Т-1000 сохраняет способность к самоорганизации и свойства всей машины. Сам сплав Т-1000, вероятно, состоит из неблагородных (переходных?) металлов, не легирован вольфрамом, молибденом или рением, так как теряет мобильность и становится хрупким при температуре около −196 °C (жидкий азот):
Кроме того, в пятой серии франшизы «Терминатор: Генезис» показано, что Т-1000 хорошо горит не только в расплаве, как в «Терминатор: Судный день», но и в кислоте (кстати, Т-800 выставляет Т-1000 под кислотный дождь, при этом Т-1000 сгорает начисто, а рука Т-800 лишь немного дымится):
Образ Т-1000 помогает задуматься о двух технологических изысках: во-первых, об удивительной функциональной универсальности жидкого металла (или сплава) и, во-вторых, о пределах миниатюризации роботов, которые могли бы координировать свои действия по принципу роя, сближаясь при этом по свойствам с клеточной культурой. Кстати, небиологическая живая система, представляющая собой рой роботов, была описана еще в романе Лема «Непобедимый», но там она не клеточная, а состоит из макроскопических металлических «букашек», то есть ближе именно к рою, но не к сплаву. Молекулы Т-1000 явно проявляют своеобразное «чувство кворума», к которому я здесь еще вернусь. Но хватит пока фантастики; рассмотрим, какие результаты в производстве жидкометаллических сплавов достигнуты на настоящий момент.
Физические свойства и инженерный потенциал жидкого металла
Металлы, остающиеся в жидком состоянии при комнатной температуре, обладают некоторыми уникальными преимуществами. В частности, они могут менять морфологию и двигаться, если воздействовать на них различными энергетическими полями, например, электрическими, магнитными или менять градиент концентрации. При динамическом движении (которое кажется автономным) иногда даже легко поверить, что металл ведет себя как живой. Но кроме жидких металлических сплавов сейчас разрабатываются и другие функциональные жидкости, роль которых в различных дисциплинах становится все важнее. Функциональная жидкость – это среда с совсем иными свойствами, нежели молекулярный раствор (скажем, водный или органический), что позволит запустить новые механизмы синтеза функциональных материалов. Функциональные жидкости можно воспроизводить с высоким разрешением, если непосредственно «писать» ими или использовать в микроинъекциях, благодаря их замечательной текучести. Такие материалы могли бы легко самозалечиваться, чем очень пригодились бы при создании гибких роботов, и, в то же время, могли бы легко разбрызгиваться и снова собираться. Такая возможность была бы очень важна в биомедицинских контекстах, например, при доставке лекарств. Многие жидкометаллические вещества сосуществуют в твердом и жидком агрегатном состоянии, поэтому могли бы запасать энергию при таком фазовом переходе, что совершенно невозможно при работе с неизменно жесткими материалами. Основные классы веществ такого рода – это жидкие металлы, ионные жидкости и жидкие кристаллы.
Жидкие металлы (сплавы) – это новый класс материалов, состоящих из постпереходных металлов. Их сплавы имеют исключительно низкие точки плавления. Например, температура плавления галлия (Ga) составляет 29,8°C – то есть, он тает в руках. Первая научно-популярная книга Сэма Кина по химии называется «Исчезающая ложка» и отсылает именно к салонному химическому приколу XIX века. Галлий внешне похож на алюминий, поэтому, если изготовить из него чайную ложку, то в горячем чае она растворится. Но галлий остается в жидком состоянии при температуре до -80°C, если заливать его в специальные трубочки. Соответственно, галлий может использоваться в качестве наполнителя для точных термометров в очень широком диапазоне. На основе галлия можно получать сплавы, демонстрирующие уникальное фазоразделение, объясняемое разницей в температурах плавления компонентов этих сплавов. Если искусственно варьировать давление и насыщенность среды электронами, жидкие сплавы можно превращать в отличные растворы для реакций. Например, существует жидкий сплав галинстан или ингас (GaInSn), состоящий примерно из 68,5% галлия, 21,5% индия и 10% олова. При добавлении в него небольшого количества гадолиния (Gd) данная смесь спонтанно намагничивается и проявляет термомагнитные свойства. Подобные сплавы на основе галлия сочетают электромагнитные и теплопроводные свойства металла с текучестью, поэтому в будущем хорошо подошли бы для создания гибкой электроники, в частности, носимой — так как сплавы галлия биосовместимы и нетоксичны. Из явных недостатков галлиевых сплавов на Хабре отмечена несовместимость галлия с алюминием и плохая совместимость с медью, которые повсеместно применяются в приборостроении и электронике.
Галлиевые микромашины
Микро/наномоторы (MNMT) разрабатываются для выполнения тонких операций в микро- и наномасштабе, в частности, внутри человеческого тела. Кроме упомянутой выше доставки лекарств и другой полезной нагрузки, такие машины могут применяться при лечении опухолей, обеззараживании, точной хирургии. Применение подобных машин основано на преобразовании химической или физической энергии в кинетическую. Производительность MNMT в наибольшей степени зависит от собственных свойств того материала, из которых они изготовлены. Изначально большинство таких машин изготавливалось из золота, платины и металлических оксидов (ZnO, Cu2O), поскольку в пероксиде водорода им можно придать ускорение при помощи химического градиента. Но в биомедицине такое химическое топливо оказалось токсичным для человека, а сами машины – слишком жесткими и негибкими. Они легко повреждают и рвут тонкие канальцы, которые в организме повсюду. Для снижения токсичности и улучшения биосовместимости таких машин проектируются модели на основе полимеров и биогибридные машины. В целом такие модели нестабильны и быстро распадаются. Именно поэтому наилучшим компромиссным решением кажутся машины из жидкого металла.
При температуре, близкой к комнатной, в жидком состоянии находятся несколько металлов: цезий, точка плавления = 28.5 °C, франций = 27 °C, рубидий = 39.3 °C, ртуть = −38.8 °C и галлий 29.8 °C. При этом ртуть очень токсична, цезий и рубидий – слишком химически активные, а франций, к тому же, радиоактивен и встречается в следовых количествах. По сравнению со всеми этими веществами токсичность галлия минимальна, кроме того, его сплавы с индием и оловом стабильны с химической точки зрения. Особыми свойствами галлиевых сплавов, наряду с упомянутыми выше, являются фототермические и фотодинамические характеристики, а также реагирование на внешние стимулы и каталитические свойства. Поэтому из галлиевого сплава потенциально можно изготовить аппаратный аналог нейрона. Также такие машины могут применяться в микрогидродинамике, томографии, обнаружении раковых клеток, устранении сосудистой эмболии.
Но вернемся к тому, что управляемость галлия (а также его сплавов) повышается в узких трубочках. В таких ограниченных пространствах сплав остается в жидком состоянии, а также реагирует на магнитные и электрические воздействия, и даже на свет. Именно поэтому галлиевые сплавы перспективны для производства микромашин. В настоящее время одна из основных сложностей при проектировании таких устройств – добиться, чтобы они автономно двигались в узких каналах к месту назначения и по прибытии выполняли относительно сложные задачи, хотя бы доставку активного вещества. В таких каналах галинстановые микромашины двигались бы гораздо быстрее твердых аналогов и даже могли бы ускоряться и менять направление движения под действием магнитного поля. Чем уже канал, тем быстрее может двигаться в нем галинстановая машина; установлено, что такое явление обусловлено электроосмосом. В качестве сил, обеспечивающих движение жидкой микромашины в узком канале, известны, например, ускорение при помощи водородных пузырьков, давления, ионного градиента, ультразвука, ионного и магнитного поля. Доказано, что в щелочном растворе (NaOH) жидкометаллические галлиевые машины под действием электрического поля движутся к катоду. Их можно ускорить, если расширять каналы, по которым они движутся, и направлять, деформируя эти каналы нужным образом.
Тем не менее, такое движение не вполне полноценно, поскольку требует постоянного внешнего воздействия и осуществимо только в лабораторных условиях. Ситуация осложняется тем, что наноразмерные машины вынуждены преодолевать поверхностное натяжение жидкости, которое при их масштабах существенно ограничивает движение. Поэтому следующее поколение жидких наномашин должно не только самостоятельно извлекать энергию для движения, но и обрастать защитным слоем, который позволит им дольше функционировать в растворах с меняющимся кислотно-щелочным балансом.
Самодвижущиеся микромашины
Синтетические самопитаемые моторы, способные спонтанно преобразовывать химическую энергию в механическую активность, тем самым обеспечивая автономную локомоцию, отлично подошли бы для создания миниатюрных роботов с функциями сенсоров или детекторов. На основе галинстана сконструированы микродвигатели миллиметровых и сантиметровых размеров. Такие машины плавают в круглой чашке Петри либо в узких каналах с разной структурой, развивая скорость до нескольких сантиметров в секунду, причем сохраняют работоспособность до 1 часа без внешнего источника энергии. Металл легко деформируется и восстанавливает форму, но, кроме того, двигатель проявляет "биомиметические" свойства, сближающие его с моллюском. Подобно тому, как моллюск поглощает кремний, обрастая раковиной, галлий амальгамируется алюминием. Активность этого процесса зависит от нескольких факторов, в том числе, объема двигателя и содержания алюминия в растворе (для такого обрастания применяются растворы хлорида натрия или карбоната натрия). В щелочном растворе (например, гидроксида натрия) алюминиевый слой разъедается, выделяются пузырьки водорода, которые также обеспечивают движение микромашины. Тем не менее, в имеющихся на данный момент галлиевых микромашинах такое движение остается подобным броуновскому, то есть, неуправляемым. Чтобы придать нужный вектор такому движению, микромашины все-таки нужно направлять извне – например, при помощи лазера. Естественно, чтобы машина реагировала на лазер, в ней должны быть светочувствительные элементы. Комбинация галлиевых сплавов со светочувствительными соединениями, например, с диоксидом титана, подводит нас к следующему интересному аспекту: оказывается, жидкометаллическая поверхность может проявлять черты «аппаратного нейрона».
Тактильные жидкометаллические компоненты и мышцы для роботов
На основе жидкого металла робота можно оснастить светочувствительными и тактильными функциями. Так, показана возможность встроить в растяжимый силиконовый носитель сеть канальцев, наполненных жидким сплавом – и добиться, чтобы при нагревании этот материал менял цвет. Аналогичное изменение цвета происходит в ответ на механическое давление. Эта примитивная логика подобна той, по которой осьминог меняет цвет, реагируя на внешние раздражители. Кожа осьминога пронизана большим количеством нервов, и для него изменение окраски – это камуфляж; мягкий робот, в свою очередь, может менять цвет в зависимости от совершаемого действия. Доказано, что изменение цвета кожи у осьминога не регулируется мозгом; это именно реакция нейронов на входящий сигнал. Материалы, из которых изготавливаются мягкие роботы, электропроводимостью не обладают, а вот жидкометаллические капли – напротив, проводят как электричество, так и тепло. Галийсодержащая начинка может реагировать и на силу схвата, и на форму объекта, захваченного роботом. Можно уже на этапе изготовления детали для робота подмешать в полимер галлий-индиевый сплав. Исходно он концентрируется в виде капелек, но в ответ на механическое воздействие капли выстраиваются в сетку, подобно нейронам. Если в полимерном материале возникают трещины или дыры, то «нейронная сеть» спонтанно перегруппируется, и материал сохраняет электропроводимость. Более того, из жидкометаллического эластомера можно изготавливать мускулоподобные структуры, которые не только меняют и удерживают форму, необходимую для работы, но и при нагревании возвращаются в исходное состояние. Если воздействовать на галлиевую составляющую такого материала электричеством, то он меняет форму так, как того требует оператор.
Чувство кворума
Наконец, возвращаемся к замечанию о том, что жидкометаллические машины – это почти рой; они могут действовать слаженно, если обладают датчиками для этой цели. Многоагентные системы такого рода могут коллективно выполнять сложные задачи, в частности, что-нибудь строить или искать. Прямые и косвенные методы координации позволяют роботам обмениваться информацией, динамически подстраиваясь под меняющиеся ситуации. У такого поведения есть хорошо известный (микро)биологический аналог, так называемое «чувство кворума» в бактериальных пленках. Оказываясь в питательной среде или окружив конкретную клетку, бактерии обмениваются химическими сигналами, благодаря которым вся колония или биопленка решает общую задачу. Такой механизм межклеточной коммуникации позволяет каждой бактерии оценивать размер популяции (сколько нас тут) и действовать в соответствии с этой информацией.
Наноразмерные роботы, обладающие подобным роевым интеллектом, могли бы воспроизводить подобное поведение в точном производстве или медицине. Кстати, бактерии, объединенные чувством кворума, зачастую представляют дополнительную опасность, поэтому микробиология внимательно изучает как раз подавление этого механизма (quorum quenching). Рассмотрим, как перенести этот механизм на рой роботов, в частности, как аппаратно реализовать аналог сигнальных молекул (автоиндукторов).
Заключение
Здесь я не решусь фантазировать о том, какого размера могла бы быть минимальная капля Т-1000, обладающая всеми свойствами его полисплава и, соответственно, являющаяся полноценным роботом. Вероятно, это может быть связано с минимальными возможными размерами транзистора (об этом рассказано в статье, перевод которой может появиться в блоге @Sivchenko_translate). В любом случае, этот небольшой экскурс в физику жидкого металла хорошо сужает круг гипотез, объясняющих многие свойства Т-1000, в частности, его термическую и химическую слабость. Было бы интересно предположить, что эта модель могла бы быть легирована скандием или молибденом для приобретения достаточной тугоплавкости и остроты режущих кромок. Основное отличие большинства описанных образцов от Т-1000 – в том, что для их функционирования нужна среда-носитель, а энергетический запас жидкометаллического робота пока также оставляет желать лучшего (робот требует регулярной или постоянной подпитки). Сейчас я полагаю, что на примере Т-1000 мы видим аппаратную реализацию сложной нейронной сети и наноразмерного роя роботов одновременно, что лишний раз заставляет задуматься, куда способны завести нас наши технологии.
Т1000 версия 1.0: бесконтактная манипуляция жидким металлом
Дабы что-то создать, нужно с чего-то начать. Современные технологии прошли долгий путь эволюции, как и любой биологический вид. Тысячи лет тому назад человек создал первое колесо, а сейчас по дорогам оживленных мегаполисов снуют автомобили, которые тяжело себе представить без этих самых колес. Отличие эволюции от технологического процесса заключается в наличии дикой идеи. Эволюция никогда не будет создавать то, в чем биологический вид не нуждается для своего выживания. Но вот наука порой отходит от этой тактики, создавая нечто совершенно ненужное, но от того не менее удивительное. Вдохновением для подобного рода творений, как показывает практика, часто становятся произведения научной фантастики как в литературном, так и в кинематографическом виде. Сегодня мы рассмотрим исследование, в котором ученые, вдохновленные кинолентой «Терминатор 2», решили разработать метод бесконтактного контроля жидкого металла. Удалось ли им воплотить в жизнь кошмар Сары Коннор, как работает данная методика, и где она может найти свое применение? Ответы на эти вопросы мы найдем в докладе ученых. Поехали.
Основа исследования
В рамках бытового использования бесконтактные технологии являются не более чем удобством, а то и банальным баловством. В настольной лампе, включить которую можно взмахом руки вместо нажатия кнопки, нет особой необходимости. Однако сама идея такой футуристики на своем рабочем столе поднимает настроение.
Если же говорить про лаборатории и производственные комплексы, то бесконтактные методы манипулирования какими-либо объектами крайне важны, так как минимизируют вероятность этот объект повредить при классическом контакте. Вариантов воздействовать на объект без прямого контакта много: магнитный, акустический, оптический и т.д. Но, как говорят авторы исследования, до настоящего времени всегда были сложности с бесконтактным манипулированием свободно текущими жидкими потоками. Если точнее, то реализация четко контролируемых изменений направления или формы жидкости, особенно без нарушения формы поперечного сечения потока, является очень сложной задачей.
Мы бы не увидели множество изобретений, изменивших нашу жизнь, если бы «сложно» кого-то останавливало. А потому в данном труде ученые изучили бесконтактное манипулирование свободно текущими потоками жидких металлов (ЖМ или LM от liquid metal).
Особое внимание в последние годы привлекли жидкие металлы на основе галистана, сплава галлия (Ga), индия (In) и олова (Sn), так как проводники из этого материала обладают рядом привлекательных свойств: мягкость, растяжимость, низкая температура плавления, сохранение текучести и металлических свойств при комнатной температуре, низкая токсичность и т.д.

Изображение №1
Ученые отмечают, что LM сплавы на самом деле плохо подходят для формирования стабильных потоков жидкости из-за их огромного поверхностного натяжения и водоподобной вязкости, которые способствуют образованию капель (1A). Однако электрохимическое окисление поверхности LM в растворе основания* снижает эффективное натяжение LM до крайне низких значений.
Основание* — химическое соединение, способное образовывать ковалентную связь с протоном или с вакантной орбиталью другого химического соединения.
Такое электрохимическое манипулирование межфазным натяжением позволяет реализовать различные удивительные эффекты, такие как обратимая деформация, формирование рисунка, эффект пульсации, «сверхтекучее» проникновение через пористую среду и т.д. Что наиболее важно, присутствие оксидных частиц на LM также позволяет формировать длинные, стабильные потоки металла, когда он выходит из сопла и попадает в раствор (1B).
Ввиду цилиндрического поперечного сечения и металлической проводимости ученые назвали эти потоки LMW (от liquid metal wire), т.е. жидкими металлическими проводами. Толщина LMW составляет примерно 100-200 мкм.
Хотя обычно LM не реагирует на магнитные поля, ток, проходящий через провод для запуска электрохимических реакций, делает его восприимчивым к магнитным силам через силу Лоренца* (1C).
Сила Лоренца* — сила, с которой электромагнитное поле, согласно классической электродинамике, действует на точечную заряженную частицу.
В данном труде ученые смогли управлять перемещением свободно падающих LMW при комнатной температуре именно с помощью силы Лоренца. Поскольку LM мягкий, он почти не оказывает сопротивления подобному манипулированию и, следовательно, ускоряется в радиальном направлении.
Смещение LMW относительно магнита также индуцирует вторичную силу в соответствии с законом Ленца (т. е. силу сопротивления, противодействующую движению на периферии магнита). Таким образом, комбинированные эффекты силы Лоренца и закона Ленца превращают металл в формы, которые отражают окружность магнита при левитации металла. Таким образом, поведение LMW зависит от положения магнита относительно LMW.
Экспериментальная установка
Галинстан вводили в ванну с электролитом через иглу диаметром 0.26 мм при контролируемом потоке (2 и 4 мкл/с). Электроды, прикрепленные к игле шприца, прикладывали 1.5 В к металлу относительно отрицательного электрода. Расстояние между электродами составляло 5 см.
Все эксперименты проводились в растворе NaOH с концентрацией 1 моль/л, залитом в пластиковый сосуд 15х15х20 см (1D). Шприц оставался погруженным в раствор близко к стенке сосуда, чтобы находиться рядом с внешним магнитом, расположенным вровень с внешней стенкой. Положение иглы оставалось фиксированным.
Вертикальное положение (PM) магнита определялось относительно фиксированного положения отверстия иглы. То есть, когда PM = 0, центр магнита находится на той же вертикальной высоте, что и отверстие. Чтобы варьировать силу Лоренца и действие закона Ленца, магнит перемещали на PM от +3 до -9 см (положительные значения означают, что магнит находится в приподнятом положении относительно отверстия).
Во время опытов напротив сосуда была расположена камера, которая вела видеофиксацию происходящего.
Результаты исследования
На 1E показаны результаты движения LMW при объемном расходе* 2 мкл/с, когда PM изменялось от +3 до -3 см с интервалом в 1 см.
Объемный расход* — объем жидкости или газа, протекающей через поперечное сечение потока в единицу времени.
Когда положение магнита было центрировано по положению отверстия иглы (PM = 0), LMW испытывал однородные силовые линии магнитного поля на выходе из сопла. Следовательно, он двигался по кругу под действием силы Лоренца (видео №1).
Однако при высоком PM (+3 или +2 см) или низком PM (-2 или -3 см) LMW испытывал «краевые» (т.е. расходящиеся) силовые линии из-за смещенного от центра магнита, а потому двигался по спирали.
Круговое движение LMW наблюдалось для PM между +1 и -1 см, а спиральное — при других положениях магниты.
Объяснить эти траектории помог силовой анализ. На LMW должны действовать три основные силы: сила тяжести (G), сила Лоренца (FL) и сила закона Ленца (FLenz). G ускоряет LMW вниз. FLenz — это сила сопротивления, вызванная изменениями магнитного потока по мере того, как металлический провод удаляется от или приближается к магниту. Сила Лоренца, определяемая формулой FLenz = B·I·L (B — напряженность магнитного поля, I — ток, L — длина LMW в магнитном поле), заставляет LMW отклоняться от своего прямого нисходящего пути при выходе из сопла. При этом вязкое сопротивление только рассеивает энергию и не определяет траекторию LMW.
На 1F показаны четыре типичные последовательности кадров (четыре этапа) временной эволюции спирали при PM = 0.
На этапе 1 (S1 от stage 1) сила Лоренца направляет LMW наружу по часовой стрелке. На этом начальном этапе силой Ленца можно пренебречь, так как LM все еще находится в однородном поле магнита.
На этапе 2 (S2) LMW движется вблизи левого края магнита. В этом месте изменения магнитного потока самые большие, и, таким образом, LMW испытывает максимальную силу Ленца и уменьшенную силу Лоренца. Таким образом, его внешнее движение замедляется в этом месте. Тем не менее новый LMW продолжает выходить из сопла и находиться под контролем относительно большой силы Лоренца. Не стоит забывать, что речь идет о жидкости, которую выпускают через отверстие непрерывно, а потому в нижней части потока ситуация отличная от той, что наблюдается ближе к соплу.
На этапе 3 (S3) LMW почти огибает край магнита. Наконец, на этапе 4 (S4) LMW полностью огибает окружность магнита и примерно принимает его квадратную форму. Все четыре этапа повторялись несколько раз, чтобы создать несколько металлических петель по периметру магнита.
Суммируя, когда LMW только выходит из сопла, на него действует сила Лоренца, в то время как сила Ленца замедляет движение потока и останавливает его на уровне окружности магнита.
Учитывая важность силы Лоренца и закона Ленца, ученые решили детальнее изучить их влияние на поведение LMW. Ранее уже было отмечено, что сила Лоренца определяется по формуле FLenz = B·I·L (B — напряженность магнитного поля, I — ток, L — длина LMW в магнитном поле). А вот действие закона Ленца определяется скоростью изменения магнитного потока: ∂ØB / ∂t ~ B·v, где v — скорость (v = L/t) LMW. Следовательно, чтобы изучить влияние этих сил, можно было варьировать значения B и VFR (объемного расхода). На изображении ниже представлены результаты при всех протестированных вариантах VFR и PM = 0.

Изображение №2
На 2A показана траектория LMW при VFR = 2 мкл/с и B = 0.1 Тл. Траектория представляет собой «поворотный полукруг», движущийся по часовой стрелке. То же происходит и для южного (S) полюса, направленного наружу, за исключением того, что LMW движется против часовой стрелки.
Увеличение VFR до 4 мкл/с при сохранении B = 0.1 Тл (2B) увеличивает длину LMW на одинаковый отрезок для всех стадий. Другими словами, увеличенная скорость потока уменьшает количество времени, необходимое для достижения каждой стадии. Например, LMW достиг стадии 4 через 0.62 секунды, тогда как при скорости потока 2 мкл/с требуется 0.87 секунды. Подобная картина наблюдалась и при увеличении магнитного поля до 0.2 Тл с сохранением скорости потока (2C и 2D).
При аппроксимации становится видно, что поведение LMW при 0.2 Тл аналогично поведению при 0.1 Тл при той же скорости потока (сравнение 2А и 2С). Это вполне ожидаемо, говорят ученые, так как эффект Лоренца (радиальное ускорение) и Ленца (радиальное замедление) линейно зависят от B. Это сходство становится очевидным при сравнении скоростей и диаметров LMW (2Е).
При VFR = 2 мкл/с скорость может достигать примерно 20 см/с за 0.7 секунды, а при VFR = 4 мкл/с скорость достигает 35 см/с всего за 0.45 секунды. Ускорение вызывает уменьшение диаметра провода (черные точки на 2E).
Согласно второму закону Ньютона (∂p/∂d = — ρ · ∂v/∂t, где ρ — плотность, а p — давление LMW) уменьшение диаметра приводит к увеличению скорости. Увеличение скорости приводит к дальнейшему уменьшению диаметра провода, вызывая дополнительное ускорение. Уменьшение диаметра провода соответствует его удлинению, что может еще больше увеличить силу Лоренца.

Изображение №3
В экспериментах, показанных на изображении №2, металл сразу же подвергается действию силы Лоренца при выходе из сопла, поскольку PM = 0. Смещение магнита ниже по отношению к положению сопла позволяет изучить поведение LMW в рамках закона Ленца (изображение выше). Сила эффекта закона Ленца зависит от магнитного поля и скорости LMW.
Первым делом ученые запустили подачу металла через сопло без магнита, чтобы исследовать скорость LMW в зависимости от расстояния от сопла (вставка на 3A). Изначально LMW выходит из сопла в виде небольшого шарика, который гравитация вытягивает вниз, что приводит к формированию цилиндрической формы. Это ускорение приводит к тому, что ведущая бусинка достигает максимального значения ~25 см/с в положении -6 см от сопла. За пределами этого положения скорость LMW становится стабильной. Изменение скорости можно описать экспоненциальной функцией.
Теперь, имея в распоряжении профиль скорости LMW, ученые перемещали магнит в разные положения, чтобы исследовать роль скорости в поведении LMW. На 3A различные положения магнита отмечены как B (-4 см), C (-5 см), D (-6 см) и E (-9 см). На 3B-3E показаны траектории LMW для различных PM (положений магнита).
При PM = -4 см металлический провод совершает спиральное движение по часовой стрелке в небольшой области вблизи верхнего левого края магнита. Траектория становится больше при PM = -5 см. Значительные изменения происходят при PM = -6 см. В результате траектория LMW отлично повторяет ту же квадратную форму окружности магнита (видео №2).
То же самое наблюдается и при PM = -9 см. Объясняется это тем, что при -9 см и -6 см достигается достаточный эффект закона Ленца, чтобы удержать жидкий металл на периферии магнита. А комбинация силы Лоренца и эффекта закона Ленца заставляет LMW вращаться по часовой стрелке.
Для демонстрации разнообразия форм, достижимых за счет этого эффекта, ученые провели несколько опытов с различными конфигурациями магнита при PM = -6 см.
Роль магнита очевидна при его горизонтальном перемещении (3F и видео №3) с разной скоростью. Это показывает, что формирование паттерна (фигуры из LMW) может быть динамичным.
Кроме того, некоторые сложные формы можно реализовать с помощью двух магнитов, которые расположены в различных конфигурациях. Например, форма ∞ в конфигурации I (3G и видео №4) или форма числа 8 в конфигурации III (3I и видео №6).
LMW также может вращаться вокруг одного магнита, только меняя полюса север/юг (N/S), как в конфигурации II (3H и видео №5) и конфигурации IV (3J и видео №7).
Не так страшен жидкий металл

Наверное многие знают или хотя бы раз слышали о существовании такой «термопасты» как жидкий металл. Если коротко — это термоинтерфейс, теплопроводность которого на порядок выше даже самой лучшей обычной термопасты. Именно так — не в 2, не в 3, а в целых 10 раз выше.
Но почему же его не используют все и везде? У многих жидкий металл ассоциируется со страшной процедурой delidding (скальпирование, снятие верхней крышки процессора). Страх повредить драгоценный процесор, плюс страх перед сложностью нанесения (по сравнению с обычной термопастой). И главное — боязнь, что жидкий металл случайно попадет куда-то не туда и что-нибудь замкнет.
Да, все эти страхи обоснованы. Однако если Вы уверены, что руки растут из правильного места, то глупо хотя бы раз не попробовать воспользоваться магией под названием liquid metal. Ни один кулер никогда не даст вам такого прироста производительности системы охлаждения.
А в некоторых случаях даже в скальпировании нет необходимости. О чем и пойдет речь далее.
Предисловие
Сколько себя помню, меня всегда раздражали «тормоза» компьютеров. Всегда искал способы повысить отзывчивость. Еще на далекой Windows 98 правил реестр для минимальных задержек меню (MenuShowDelay=1 > HKEY_CURRENT_USER\Control Panel\Desktop), один из первых использовал только появившийся Gigabyte I-Ram (4 планки памяти с li-ion аккумулятором) под операционку, а уж про опыт с самыми разными SSD так вообще отдельную статью можно писать.
Ну и конечно же разгон процессора — это само собой разумеется. Нет, без экстрима и даже без водяных установок, но с температурой приходилось бороться. Корпус с огромным 40см вентилятором, различные дополнительные радиаторы, лучшие термопасты (Noctua NT-H1, Gelid GC-Extreme), много чего перепробовано.


Жидкий металл конечно тоже давно не давал покоя. Но сперва решил потренироваться «на кошках».
Подопытный
Суть в том, что эксперименты со скальпированием можно отложить на потом, а опробовать супер-термоинтерфейс уже сейчас. Правда ли жидкий металл так хорош как говорят или привирают. Ведь процессоры ноутбуков в большинстве своем уже «голые». Просто добавь воды жидкого металла.
Есть у меня Lenovo T450s. Уже относительно старенький, но на вполне бодром (по меркам ноутбуков) i7-5600u. Надо ли уточнять что базовая производительность меня совершенно не устраивала. Конечно же были отключены все энергосбережения, только max performance, только хардкор. Пусть и в ущерб времени работы от увеличенной (72Wh) батареи, но процессор почти всегда работает на 3+ Ггц. Ну не люблю я когда медленно, это уже зависимость.
В итоге конечно же за этим ноутом руки всегда в тепле. Нет, до фена ему далеко, но небольшой перегрев чувствуется даже при не на 100% занятом процессоре.
Вот как это выглядит графически:
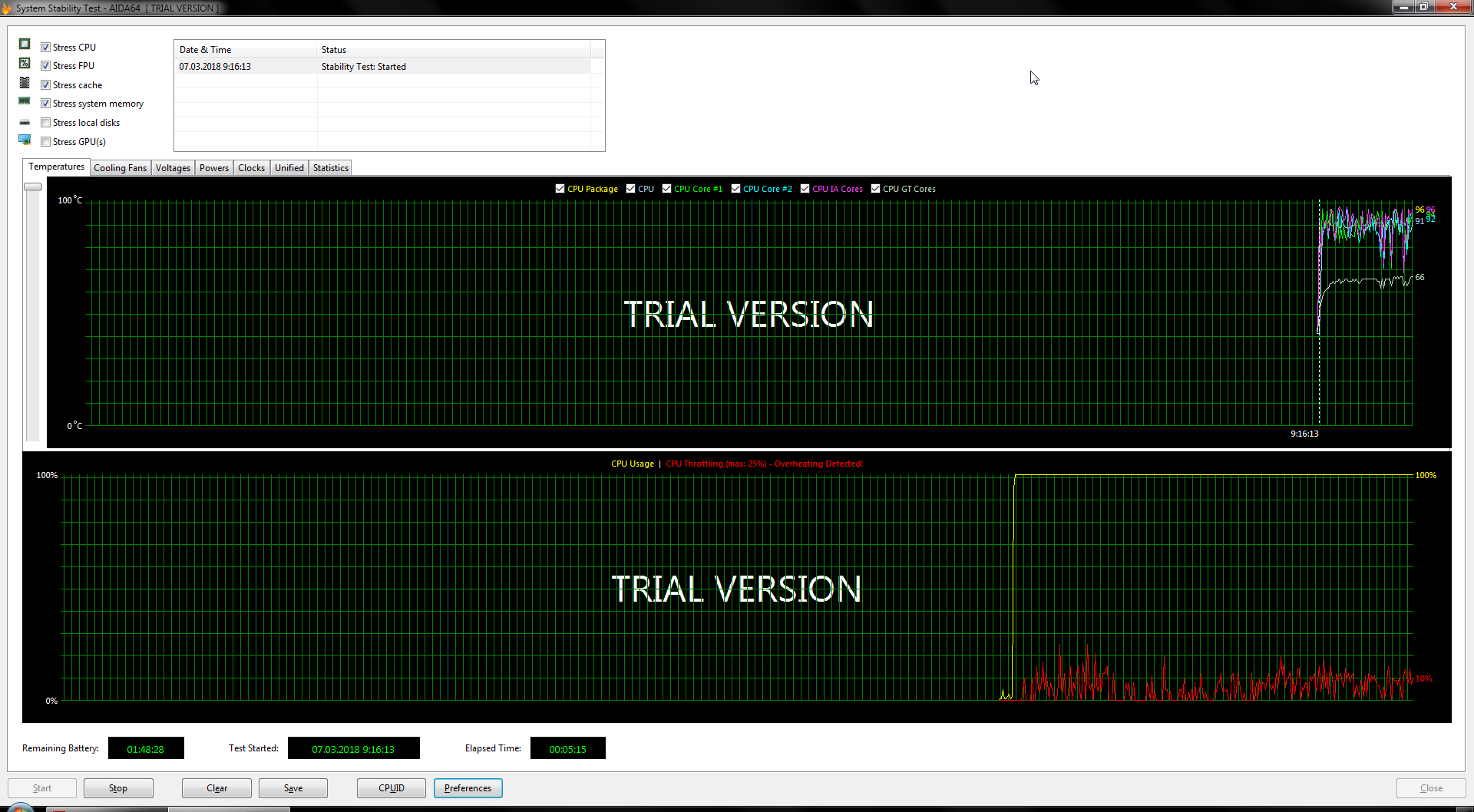
При 100% нагрузке имеем температуру 95+ градусов и постоянный троттлинг процессора.
Conductonaut
Жидкий металл можно купить от нескольких производителей. Возможно какие-то лучше/хуже или выгодней по цене за грамм. Но задачи не стояло выяснить кто лучший. Было решено попробовать вариант от Thermal Grizzly.
Обычно за подобными эксклюзивными вещами иду всегда закупаться на ebay, amazon и т.п. Но каково же было удивление когда обнаружил то что нужно, да еще и по более низкой цене, в местном сетевом магазине. Хоть и под заказ конечно, но ожидание заняло всего лишь дня 3.
Все полностью локализировано.


В комплекте, помимо самого шприца с волшебным веществом, получаем: металлическую насадку-иглу и подобную пластиковую (даже не знаю зачем она), алкогольные тампоны для протирки, две ватные палочки, инструкция и большое красное предупреждение — «Не использовать с алюминиевыми радиаторами». Хотя слабо представляю кого-то, кто на столько заморочится термоинтерфейсом, но при этом будет использовать менее термопроводные алюминиевые радиаторы.
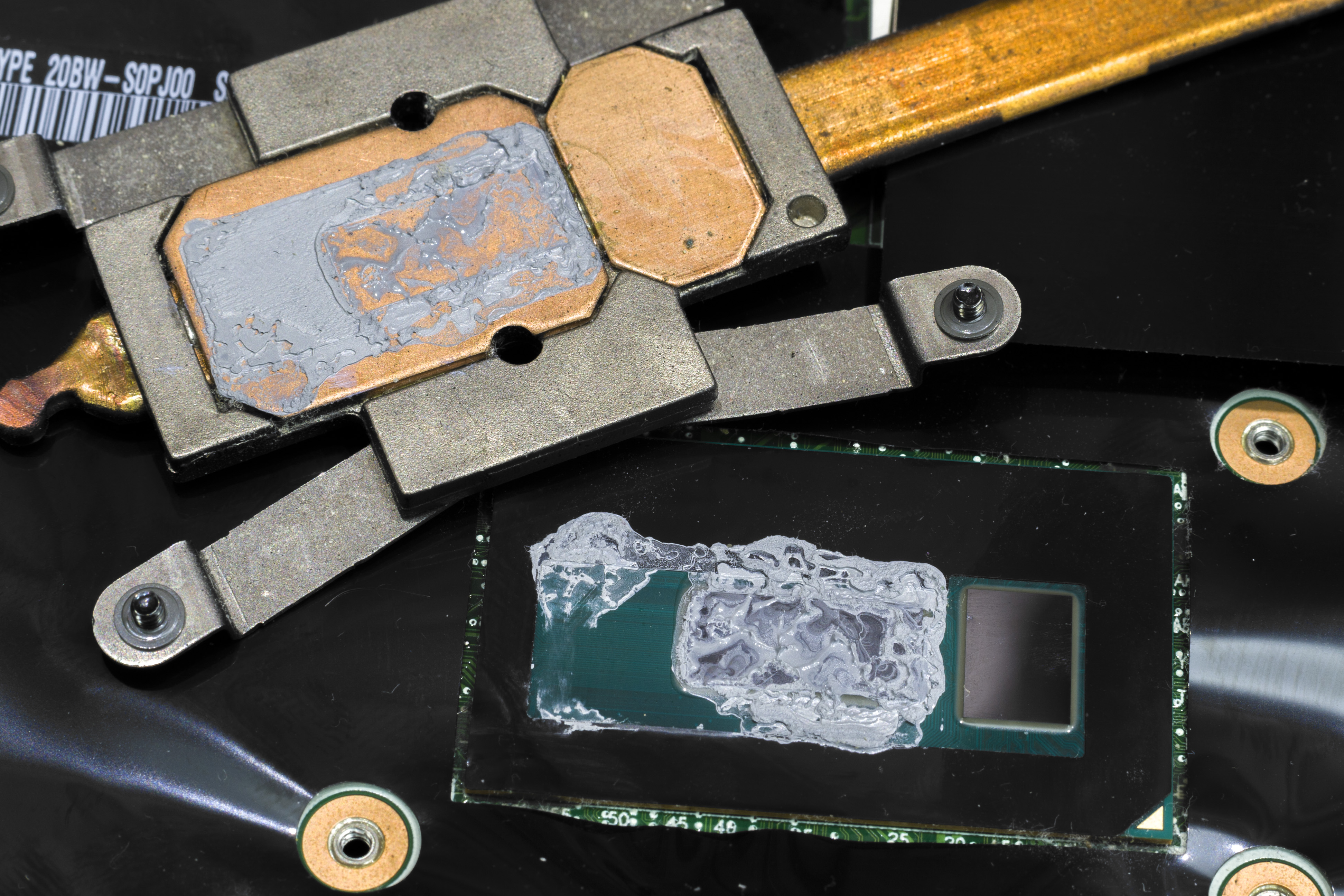
Добравшись до процессора, очень удивился когда увидел один из кристаллов совершенно без термопасты. Еще более удивила медная пластина радиатора над ним, сделанная более утопленной на примерно 1мм. Таким образом слой термоинтерфейса там должен быть очень уж толстый.
Но погуглив, узнал что на самом деле так и должно быть. Второй кристалл — это PCH (южный + частично серверный мост). И он так понимаю не особо греется и уж тем более не должен дополнительно подогреваться теплом процессора. Поэтому оставил его как есть.

Снял черную защитную наклейку и очистил старую термопасту с процессора и радиатора.
Следующий шаг — защита от короткого замыкания. Не думаю конечно, что жидкий металл будет как вода плескаться по всему окружению. Но минимальную защиту сделать необходимо.
В строительном магазине приобрел балончик жидкой резины.

И с помощью ватной палочки (обычной, не из комплекта Thermal Grizzly) аккуратно закрасил все контакты процессора. Вместо жидкой резины можно много чего другого использовать, но решил испробовать именно ее.

Далее, вернул обратно черную защитную пленку и сверху еще раз прошелся жидкой резиной вокруг самого кристалла процессора.

И наконец самое интересное. Крайне аккуратно выдавил из шприца капельку похожую на ртуть.
Сперва на медную пластину радиатора. Начал растирать ее тампоном, но ничего не получалось вначале. По ощущениям это похоже на лужение меди. По началу припой никак не хочет прилипать, но потом схватывается и очень хорошо и равномерно держится. Повторюсь, не надо сразу много жидкого металла, нужно выдавить крохотную каплю и «залудить» необходимую поверхность. Примерно на глаз прикидывая в каком месте радиатор будет как раз над кристаллом процессора. А дальше при необходимости можно чуть добавить в центр. Но не нужно наносить толстый слой, иначе жидкий металл просто выдавится каплями наружу. И хорошо если попадет на нашу жидкую резину, а не куда-то дальше.
И точно также размазал поверхность CPU. Соединил смазанные части бутерброда и собрал все обратно как было.
Уже хорошо. Но нет, самое интересное оказалось дальше.
Я конечно ожидал улучшения, но без особых иллюзий. Ну максимум на 10-15 градусов улучшения расчитывал. Однако, как говорится, фото заменит тысячу слов:
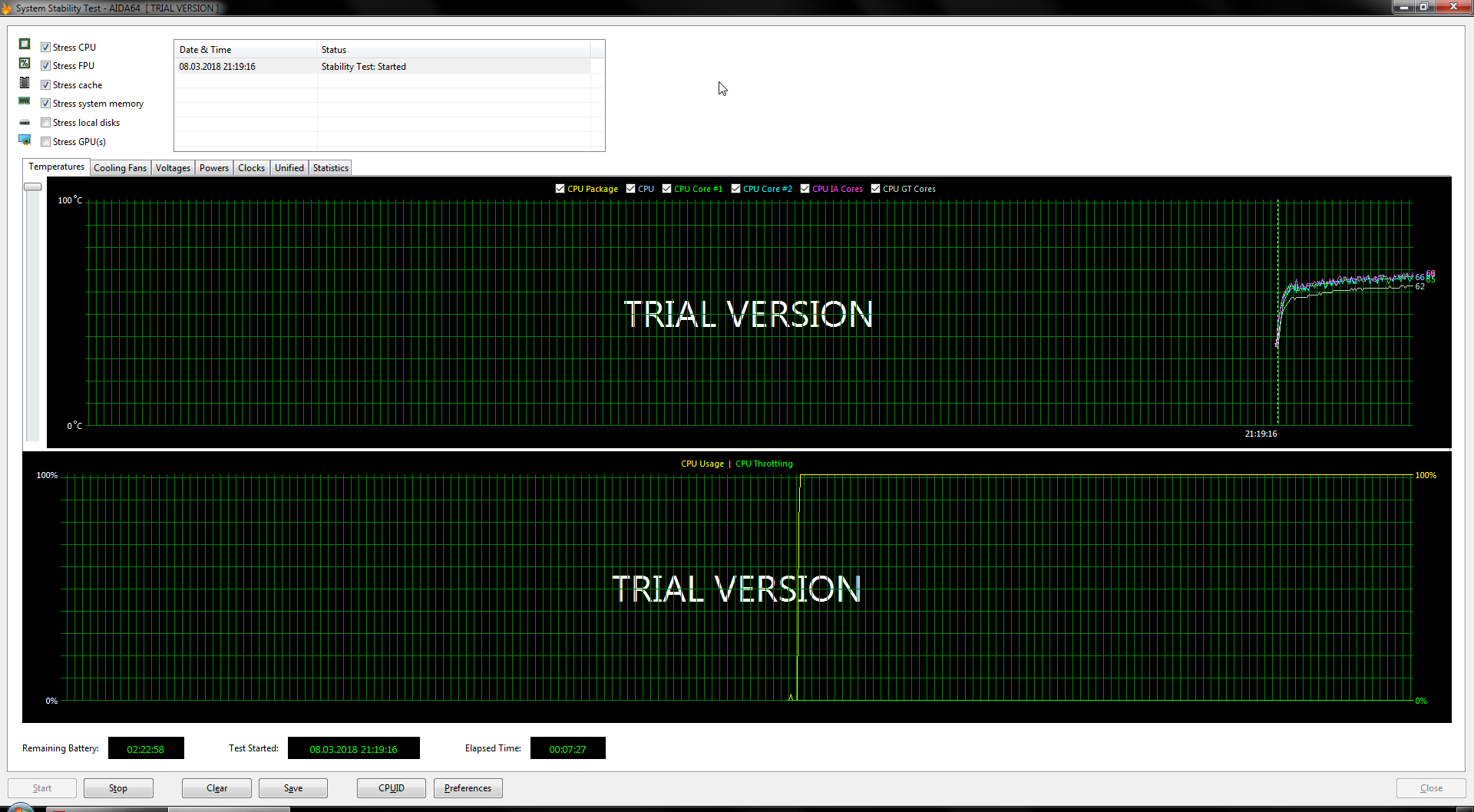
Средняя температура под полной нагрузкой снизилась с ~95 до ~65 градусов. Это целых 30 градусов разницы. И абсолютно никакого троттлинга.
Спустя несколько дней использования, могу сказать что процессор конечно выделять тепла меньше не стал. Он как жарил так и жарит, но тепло его теперь гораздо быстрей отводится и больше нет и намека на перегрев.
Выводы
Действительно ли есть толк от жидкого металла — есть, еще и какой.
Действительно ли так сложно и страшно его наносить — как по мне так слишком преувеличивают.
В общем, однозначно рекомендую всем.
Буду позже еще экспериментировать с разными другими процессорами и возможно на видеокарте испробую.
В NASA создали материал для производства терминатора Т-1000

Созданный материал относится к особому классу объемных стекол — Bulk Metallic Glasses (BMG). Новый материал, несмотря на внешний вид, достаточно много весит, но при этом он обладает отличной электропроводимостью и огромной прочностью, а также способен сохранять работоспособность при крайне низких и высоких температурах. Для космических аппаратов, которые работают сегодня в условиях очень низких температур, для поддержания функционирования и защиты внутренних частей необходимо не только обеспечить робота защитной обшивкой, но и использовать для поддержания работы специальную подогреваемую смазку, что является очень энергозатратным процессом. Применение жидкометаллического стекла позволит создать надежный защитный каркас, который не будет нуждаться в дополнительной смазке и затратах энергии.
Что касается процесса производства, то металлический сплав сперва нагревают до 800-900 градусов по цельсию для придания жидкой формы и разобщения связей между химическими элементами, а затем резко охлаждают на 1000 градусов. Это позволяет создать жесткий металлический материал, внутри которого останется жидкий металл.

На фото круглое жидкометаллическое стекло. Чуть выше — такое же стекло, которому задали другую форму
При этом такое стекло сохраняет свои свойства и после новых внешних воздействий. Оно может «перетекать» в другое место при нагревании, после чего вновь застывает. Новое покрытие может быть не только надежной защитой от внешних воздействий, но и средством «саморемонта», закрывая пробоины слоем жидкого металла. Сами создатели вполне допускают использование нового материала не только в качестве элементов обшивки, но и для создания каркаса роботов, в шутку называя свое изобретение «первым шагом на пути постройки Т-1000».
Заголовок - желтее некуда. Я открою ужасную тайну, но любой (или почти любой) металл может перетекать из одной формы в другую при нагревании *тут должна быть зловещая музыка* . и застывать в этой форме при остывании. А ртуть, прикиньте остаётся жидким металлом и без нагревания! Надеюсь я не порвал сча шаблон учёным из NASA *сарказм*
Мы точно катимся в 3.14зду.
Нужно искать инфу про уничтожение робототехники и способы выживания в любых условиях.
Ах да, еще ломик купить.

NASA одобрило продолжение работ над роем плавающих микророботов для океана Европы
NASA разрешило продолжить работы по проекту SWIM, в рамках которого на Европу может быть отправлен рой небольших плавающих микророботов. Ожидается, что когда они при помощи плавящего лед криобота доберутся до подповерхностного океана спутника, то измерят его свойства, а также поищут биомаркеры, сообщается на сайте Лаборатории реактивного движения NASA.
Европа, NASA
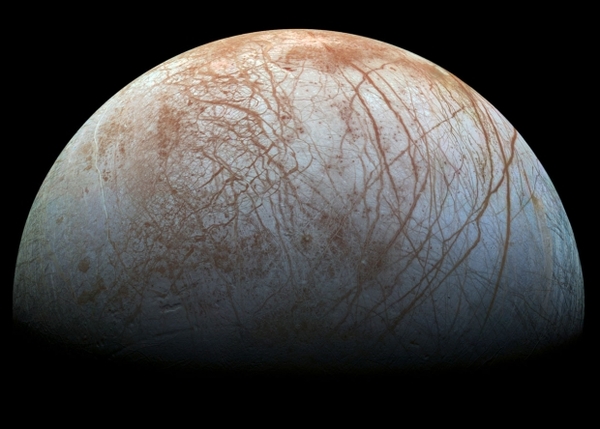
Спутник Юпитера Европа представляет для астробиологов одно из интереснейших тел в Солнечной системе, под его ледяной корой скрывается многокилометровый водный океан, не замерзающий из-за разогрева недр спутника под действием приливных сил со стороны Юпитера. Океан порождает гейзеры, выбрасывающие водяной пар из трещин в коре, а на его дне могут идти гидротермальные процессы, что обеспечивает условия для возникновения микробиологических форм жизни. В настоящее время идет разработка межпланетных станций Europa Clipper и JUICE (Jupiter Icy Moon Explorer), целью которых будет Европа, а также спускаемого модуля Europa Lander.

Концепция проекта SWIM, Источник изображения: NASA / JPL-Caltech
Проект SWIM (Sensing With Independent Micro-Swimmers) был выбран в 2021 году в рамках программы NIAC (NASA Innovative Advanced Concepts) по поддержке инновационных идей в области астрономии и космонавтики, которые могут быть реализованы в течение ближайших десятилетий. SWIM предполагает исследование океана Европы при помощи роя 3D-печатных плавающих клиновидных микророботов длиной около 12 сантиметров и объемом от 60 до 75 кубических сантиметров, которые способны поддерживать связь при помощи ультразвука. Около четырех десятков роботов могут быть загружены в криобот, длиной 10 сантиметров и диаметром 25 сантиметров (он разрабатывается в рамках проекта SESAME), который будет пробираться сквозь кору Европы, плавя лед. Когда роботы попадут в океан, то будут заниматься анализом его свойств, таких как температура, соленость, уровень кислотности и давление, и искать биомаркеры.
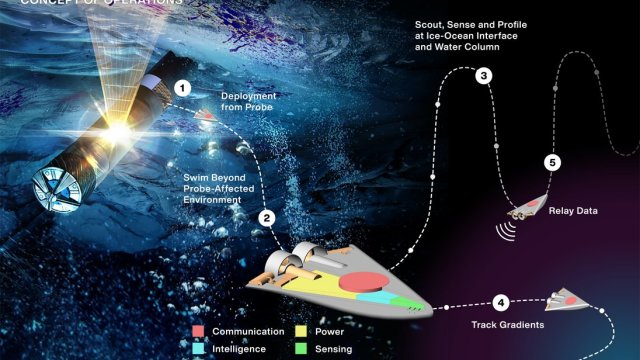
В концепции зондирования с помощью независимых микроплавателей (Sensing With Independent Micro-Swimmers - SWIM), проиллюстрированной здесь, десятки маленьких роботов спустятся через ледяную оболочку Европы с помощью криобота, изображенного слева, в океан внизу.
В конце июня 2022 года NASA объявило, что проект SWIM успешно завершил первую фазу работ и выиграл право приступить ко второму этапу, который рассчитан на два года, при этом команда проекта получила 600 тысяч долларов. Теперь она должна провести проектирование, прототипирование и тестирование прототипа робота, системы связи роботов между собой, а также построить модель управления роем роботов.
Хаббл запечатлел возможные выбросы воды на Европе

Первичная Пасхалочка Трансформеров
Воды нет. Растительности нет.
Полезных ископаемых нет. Населена Роботами.
Фактически, 100%-ное сходство с Кибертроном, где кибернетические жители имели свои первоначальные формы тел, без признаков маскировок в иноземную технику.
Вопрос лишь насчет Атмосферы . . .
Роборуку китайской космической станции показали на видео
Управление программы пилотируемых полётов КНР (CMSA) опубликовало видео, демонстрирующее, как огромная роботизированная рука перемещается по внешней поверхности китайской космической станции «Тяньгун».
В апреле 2021 года на сверхтяжелой ракете Long March 5B с острова Хайнань на околоземную орбиту был выведен Tianhe — основной модуль новой китайской космической станции Tiangong, которую предстоит осваивать китайским космонавтам. И, чтобы облегчить труд тайконавтов, на Tiangong доставили роботизированную руку-ассистента.
В непродолжительном ролике запечатлено, как 10,2-метровая механическая рука поднимается из-за модуля «Тяньхэ» и тянется к стыковочному порту, расположенному на переднем плане. Согласно имеющимся данным, опубликованные кадры были засняты панорамной камерой D, расположенной на модуле «Тяньхэ», базовом модуле китайской орбитальной станции, который был запущен в космическое пространство в апреле прошлого года.
Что касается роботизированной руки-манипулятора, то она уже использовалась китайскими астронавтами для выполнения самых разных задач задач, в том числе в рамках проведения внекорабельной деятельности, а также в процессе проверки систем и аппаратуры модуля.
Находящиеся на станции астронавты также использовали механическую руку для захвата и перемещения грузового корабля «Тяньчжоу-2», который прибыл на станцию в прошлом году.
В дальнейшем роботизированный манипулятор будет использоваться для перемещения новых модулей орбитальной станции, которые должны быть выведены в космос во второй половине 2022 года. С помощью манипулятора китайские астронавты будут перемещать дополнительные модули станции из фронтального стыковочного порта в боковые стыковочные узлы для формирования окончательного T-образного облика станции «Тяньгун».
Подпишись, чтобы не пропустить новые интересные посты!

Робот Фёдор, пес и кот. Глава 1

Давным давно, на Пикабу я прочитал замечательную повесть пикабушника MaxKitsch "Большой дом". Прошло время и я понял, что в любимой с детства повести Успенского, я вижу совершенно новую историю. А так как моя работа связана с космосом, то других вариантов у меня просто не было.
Итак, ближайшее будущее, НИИ робототехники где-то на просторах нашей родины…
В одной лаборатории робототехники робот был. Звали его робот Фёдор. Потому что он был очень серьёзный и самостоятельный. Он в четыре года дрелью сверлить научился, стрелять с двух рук и на квадроцикле кататься, а в шесть уже на Международную космическую станцию слетал. В общем, очень хороший робот. И руководители были хорошие — главный конструктор и гендир.
И всё было бы хорошо, только генеральный директор зверей не любил. Особенно всяких кошек. А робот Фёдор зверей любил, он их по каналу «Дискавери» смотрел часто, и у него с генеральным всегда были разные споры.
А однажды было так. Идёт себе робот Фёдор по лестнице и пост в твиттер печатает. Видит — на окне кот сидит. Большой-пребольшой, полосатый. Кот говорит роботу Фёдору:
— Неправильно ты, робот Фёдор, пост пишешь. Ты в нём «Роскосмос» хвалишь, а надо американских астронавтов из NASA ругать. Тогда больше комментов и хайпа получится.
Робот Фёдор попробовал по-другому написать — так и вправду лучше заходит. Он кота во френды добавил и спрашивает:
— А откуда ты знаешь, что меня роботом Фёдором звать?
— Я в вашем НИИ всех знаю. Я на чердаке живу, и мне всё видно. Кто перспективный, а кто не очень. Кому дадут следующий круг грантов, а кого на мороз отправят или в музей. Только сейчас на моем чердаке реновация, его стартап выкупил, и мне жить негде. А потом и вовсе могут дверь запереть — коммерческая тайна.
— А кто тебя разговаривать научил? — спрашивает робот Фёдор.
— Да так, — говорит кот. — Где слово запомнишь, где два. А потом, я у профессора одного жил из института медико-биологических проблем, который язык зверей изучал для программы «Бион-М». Вот и выучился. Сейчас без языка нельзя. Пропадёшь сразу — или в контактный зоопарк загремишь, где тебя дети насмерть затискают.
Робот Фёдор говорит:
— Пошли ко мне в лабу жить.
— Гендир твой меня выгонит, он любит фотки с роботами в интерьере для инстаграма, а от меня шерсть, беспорядок.
— Ничего, не выгонит. Может, главный конструктор заступится.
И пошли они к роботу Фёдору. Кот поел и весь день под диваном спал, как барин. Робот же продолжил тренироваться к долгосрочной космической миссии, а в перерывах посты в твиттер писал — иногда даже смешные. А вечером гендир с главным конструктором пришли. Гендир как вошёл, сразу и сказал:
— Что-то у нас кошачьим духом пахнет. Не иначе как робот Фёдор кота притащил.
А главный конструктор сказал:
— Ну и что? Подумаешь, кот. Один кот нам не помешает. У нас одних только стартапов сколько, и почти все убыточные.
— Тебе не помешает, а мне помешает.
— Чем он тебе помешает?
— Тем, — отвечает гендир. — Ну ты вот сам подумай, какая от этого кота польза?
Главный конструктор говорит:
— Почему обязательно польза? Вот какая польза от этого календаря главкосмосовского за прошлый год на стене?
— От этого календаря на стене, — говорит гендир, — очень большая польза. Он дырку на обоях загораживает, которую наш Фёдор просверлил, когда к полёту готовился. А ещё там космонавтки в стиле пин-ап нарисованы и наш робот в шахматы играет.
Это он зря, конечно, про этот календарь вспомнил. Его за сексизм только ленивый не ругал, а робот Фёдор в шахматы играл очень средне — у него рейтинг ЭЛО выше 2500 ни разу не поднимался. Главный конструктор говорил, это потому, что Фёдор недостаточно усидчивый.
— Ну и что? — не соглашается главный конструктор. — И от кота будет польза. Мы его маскотом сделаем, отправим работать в отдел пиара. Будет у нас кот вести соцсети и фоточки свои в инсту выкладывать. Будет на ведении блогов зарабатывать, в СМИ комментарии экспертные давать о космонавтике.
Гендир даже рассердился:
— Вечно ты со своими фантазиями! Ты мне робота испортил. Он теперь в МЧС или армию, как нормальные роботы из «Бостон Динамикс», идти не хочет, только о космосе и мечтает. Ну вот что. Если тебе этот кот так нравится, выбирай: или он, или я.
Генеральный конструктор сначала на гендира посмотрел, потом на кота. Потом опять на гендира и опять на кота.
— Я, — говорит, — тебя выбираю. Я с тобой уже давно знаком, и мой паспорт у тебя в сейфе лежит, а этого кота в первый раз вижу.
— А ты, робот Фёдор, кого выбираешь? — спрашивает гендир.
— А никого, — отвечает робот. — Только если вы кота прогоните, я тоже от вас уйду.
— Это ты как хочешь, — говорит гендир, — только чтобы кота завтра не было!
Он, конечно, не верил, что робот Фёдор из НИИ уйдёт. И генеральный конструктор не верил. Они думали, что он просто так говорит. А он серьёзно говорил.
Он с вечера сложил в рюкзак всё, что надо. И мультитул, и комплект предохранителей, и три тома инструкций по диагностике и саморемонту в полевых условиях. Взял все деньги, которые на новый квадроцикл копил. И приготовил скафандр для животных, который на тестировании в соседней лабе лежал. Кот как раз в этот скафандр помещался, только глаза из визора зеленым горели. И лёг на подзарядку.
Утром гендир с главным конструктором в командировку улетели, в Москву. Робот Фёдор проснулся, сварил коту каши, сам себе быстро тесты ежедневные провёл и стал письмо писать.
«Дорогие мои создатели! Генеральный директор и главный конструктор!
Я вас очень люблю. И зверей я очень люблю. И этого кота тоже. А вы мне не разрешаете его заводить. Велите из лаборатории прогнать. А это неправильно. Я улетаю на Луну и буду там жить. Вы за меня не беспокойтесь. Я не пропаду. Я всё умею делать и буду вам писать и звонить. А в армию мне ещё не скоро. Только на будущий год контракт подписан, я сам в юридическом видел.
До свиданья. Ваш робот Фёдор».
Он положил это письмо на свой рабочий стол, взял рюкзак, кота, скафандр и поехал на космодром Восточный.
ЗЫ Если понравится, буду публиковать и дальше. Изначально я делал повесть для проекта "Варкотики", но он умер и удалось опубликовать всего две главы.
Читайте также: