Каркас робота из металла
Обновлено: 25.04.2024

Собрать робота из отечественного металлического конструктора, который многие из моего поколения помнят еще с уроков школьного труда в детстве. Возможно ли? Такой «вызов» я себе поставил, заодно решив посмотреть как возможность данного предприятия, так и для прощупывания почвы создания хоть и не очень сильного, но конкурента импортных наборов, занимающих на российском рынке монопольную долю. Предупрежу, что далее будет много фотографий и текста и что я покажу только как создать управляемую тележку с микроконтроллером, которую вы самостоятельно сможете дооснастить любыми датчиками.
Идея, с одной стороны, разрешимая — зная, что у импортных аналогов «нашего» конструктора, к примеру компании Merkur, есть двигатели и управление можно было ожидать успеха и в этом случае. С другой стороны — у российского конструктора шаг все-таки метрический, а вся электроника и детали увы «заточены» под дюймовый стандарт. Причем задача стояла не использовать по возможности никакие крепежные элементы, кроме деталей конструктора.
Для этих целей на один из Новых Годов я «подарил» себе набор «Грузовик и трактор». Набор конечно же был отобран сыном сразу после появления дома, трактор собран, потом им играли некоторое время, и уже после можно спокойно было разобрать конструкцию обратно на запчасти.

Также из электронно-китайских запасов были взяты мотор-редукторы с колесами и дисками с прорезями для энкодера — 2 щт, самый дешевый драйвер двигателя — 1 шт, блютус-адаптер HC-06 — 1 шт, энкодеры — 2 шт, макетная плата 17x10 — 1 шт, провода для макетной платы, перемычки, а также плата Arduino Leonardo.
Но вернемся к деталям — встал вопрос, а что делать? Было решено построить для начала четырехколесную тележку с двумя независимыми мотор-колесами, энкодерами, блютус и управлением со смартфона. В дальнейшем эту тележку планировалось дополнить датчиками и сделать автономной и управляемой по заданной программе.
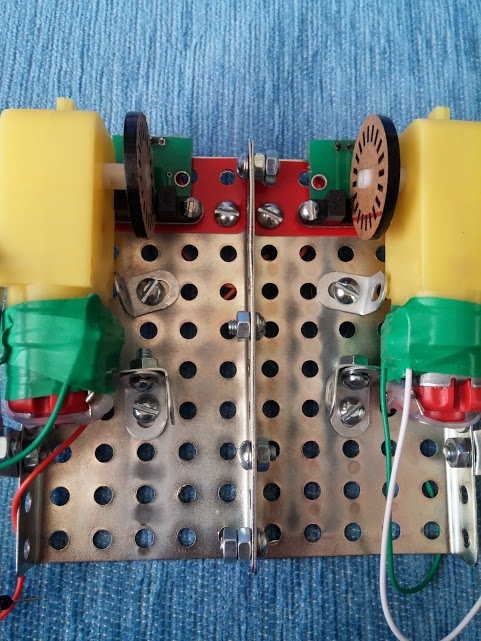
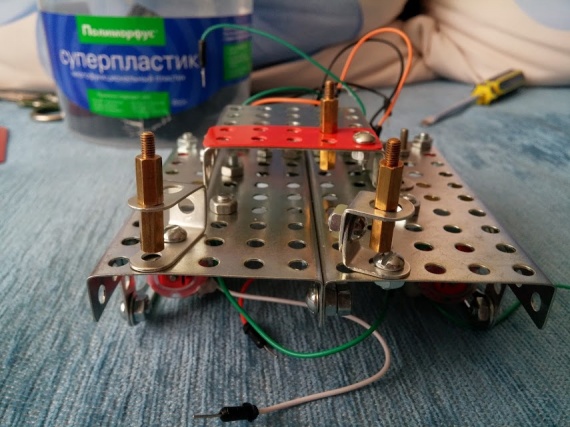
После некоторого времени кручения железяк конструктора и прикидывания куда и что разместить, родилась следующая конструкция. Собираем основание тележки с мотор-редукторами и энкодерами.
Собираем основание тележки с мотор-редукторами и энкодерами.
Основание тележки мы собираем из двух симметричных половинок. Я буду использовать терминологию для деталей из официальной инструкции набора. Сначала прикрепляем к большой панели пластик 50x20 двумя винтами. Это будет изолирующее основание для энкодеров. Вы можете их не ставить — для управления по блютус или базовых задач по робототехнике они не обязательны.

К боковой стороне прикручиваете две детали — планку сегментную 2 и планку с тремя отверстиями.

Далее устанавливаете скобу I и уголок I как показано на фото. Энкодеры прикручиваете винтами с гайками М3 (у меня под рукой были только M3x15). Скобы чуть отгибаете. Наклон будет нужен для размещения мотор-редуктора в правильном положении.
Устанавливаете мотор-редуктор с припаянными проводами и заизолированной зоной пайки, так чтобы он попал выступом в паз на сегментной планке и закрепляете на ней же винтом с гайкой M3. У меня не было длинного винта M3 длиной 25-30 мм, поэтому я использовал просто винт M3x15, который вставил в отверстие мотор-редуктора. Обращаем внимание на энкодеры, если вы их поставили.
Фиксируем мотор уголком I и зеркально собираем вторую половину основания и скрепляем их между собой.
Колеса
Наша тележка пока имеет только два колеса. Так как мы не планируем делать балансирующего робота, то ей надо добавить еще точки опоры. Вариантов было несколько — третье колесо, два колеса на одной оси или колеса на независимых осях.
От одного колеса сразу отказались — сделать шарнир нужного свойства из оставшихся деталей было проблематично. Решил сделать конструкцию с независимыми колесами (на фото показана тележка уже со смонтированной электроникой, так как сначала собрал неудачный вариант с колесами на общей оси и в итоге переделывал конструкцию уже после сборки всего робота).
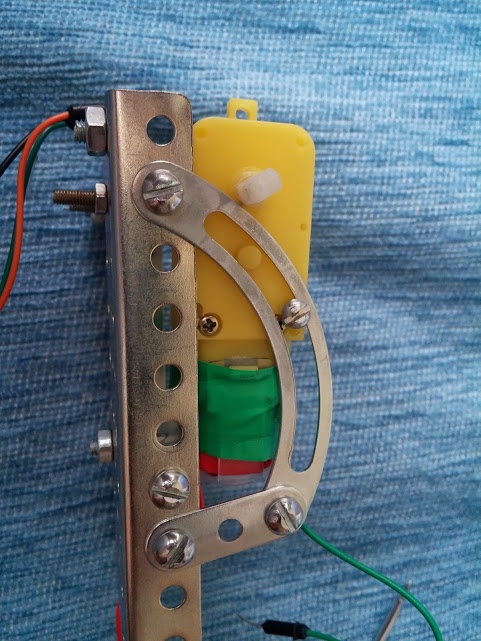
Для сборки одной оси нам понадобятся шпилька L=75M4, колесо большое, уголок I, диск большой и винты с гайками. Главная задача при сборке — ось должна быть закреплена неподвижно и законтрена вторыми гайками, а колесо, наоборот, должно вращаться свободно с небольшим люфтом.

Электроника
Переходим к электронике. Так как у нас экспериментальный робот, то все соединения мы будем делать на макетной плате, а также использовать для управления плату Arduino Leonardo.
Из Панели, 4-х Уголков I, пластика 50x20, Скобы большой и 6 стоек под плату 10x3 (можно использовать три стойки и три винта M3x5) сооружаем каркас для установки макетной платы и платы Arduino.
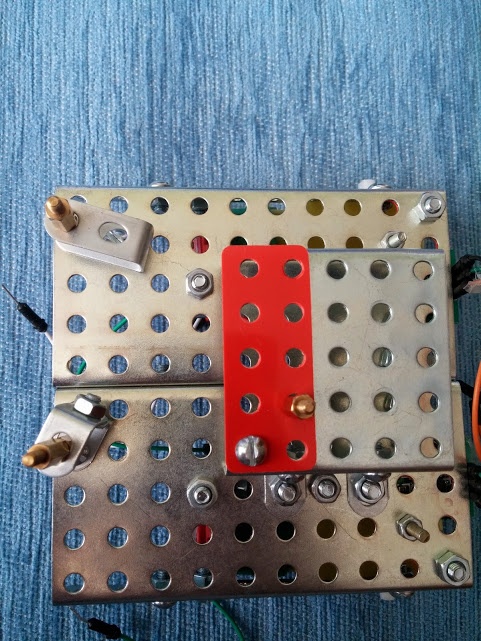
Далее закрепляем на двусторонний скотч макетную плату 10x17 со сдвигом, так как нам надо будет разместить драйвер двигателя. Если у вас драйвер двигателя с прямыми ножками подключения, вы можете не делать такой сдвиг — главное, чтобы после установки платы Ардуино у вас было место для установки остальных плат. Прикручиваем плату Arduino (я использовал опять же стойки, так как у меня их был избыток, а гаек M3 недостаток.
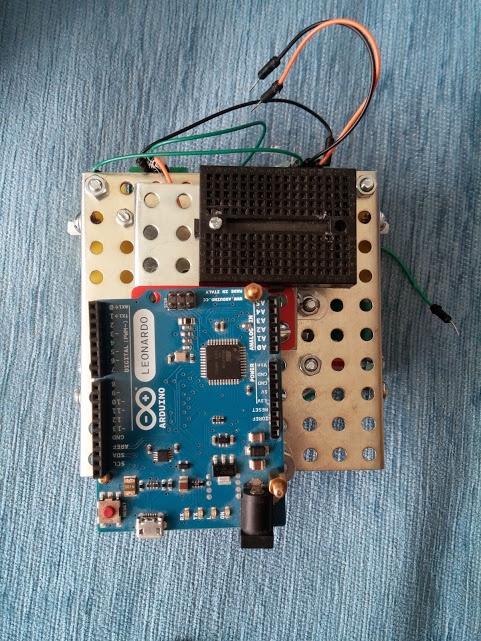
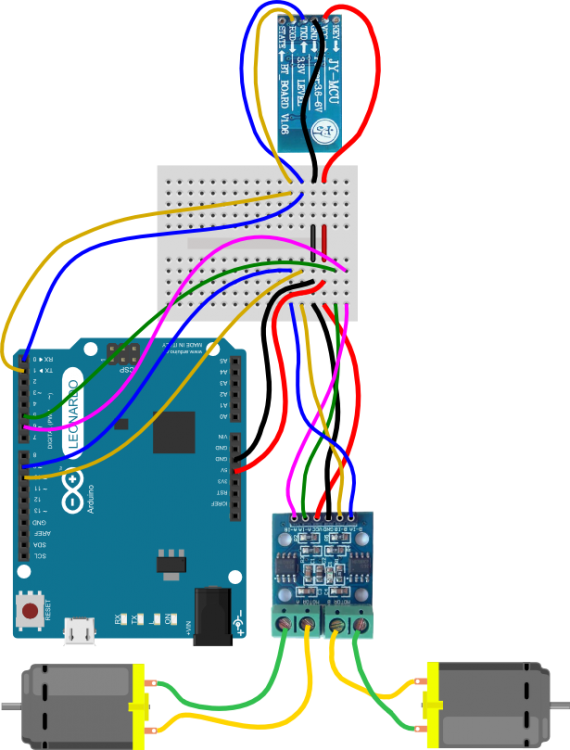
Устанавливаем на макетную плату Bluetooth модуль, плату драйвера и подключаем все провода к макетной плате и плате Arduino по схеме. Энкодеры можно подключить к питанию и Arduino, но я пока их не использовал.
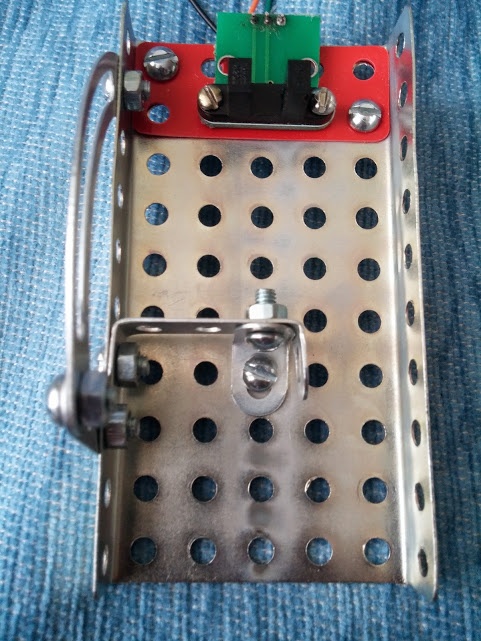
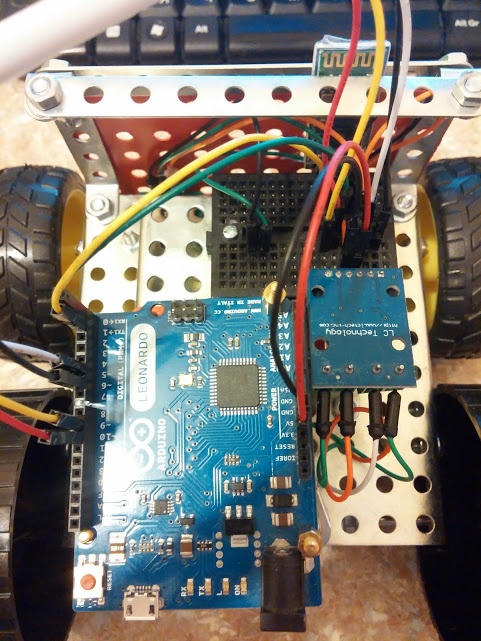
После решил защитить провода и зафиксировать блютус модуль от разбалтывания, поэтому собрал вот такую «защиту» для передней части нашего робота (у нас передние колеса ведущие). Для этого использовали детали: Скоба II — 2 шт, Планка с 10 отв. — 2 шт., Пластик 75x100.
Программное обеспечение
На деле это самая простая часть — в Интернет полно примеров, как заставить такую тележку «бегать» управляя ей со смартфона или другим способом. Для этого используется передача через Serial порт команды в виде буквы и ее последующая обработка. Используя данные производителя платы драйвера двигателей по разводке и таблицу истинности легко задать скетч для Arduino. Конечно, легко на словах — я потратил 4 часа, пытаясь найти проблему работы скетча. Как оказалось для Arduino Leonardo (что кстати написано в документации на сайте) надо использовать Serial1, вместо простого Serial. Поэтому если у вас плата, отличная от Leonardo, используйте нужную подпрограмму для вашей платы (для UNO, к примеру замените все Serial1 на Serial в тексте). Сам код можно найти по ссылке.
Посмотрев код видно, что мы используем стандартную раскладку WASD для движения и T для остановки.
После того как зальете программу в плату, проверьте что моторы подключены правильно и крутятся в нужную сторону, открыв терминал в Arduino IDE и передавая символы команд. Также можете поэкспериментировать со значением PWM.
Теперь приложение для Android. Тут тоже все достаточно просто: мы воспользуемся конструктором приложений MIT AppInventor 2 и создадим вот такую программу. В ней мы используем события TouchUp и TouchDown к элементам управления, передавая символ движения при его касании и остановки при отпускании.


Вы можете установить на смартфон специальное приложение для отладки или сформировать пакет для установки на Android смартфон, подключить к тележке батарею (я использовал внешний аккумулятор для смартфона), подключить bluetooth устройство (HC-06 в моем случае) и наслаждаться тем, что вы сами создали радиоуправляемую тележку.
А далее дело за вашей фантазией по превращению в робота. Можете поставить ультразвуковой датчик расстояния и сделать так, чтобы тележка не натыкалась на препятствия. Можете прикрутить фотодатчики и заставить робота ездить по линии. Можете поставить по периметру датчики касания или прикрутить видеокамеру и погрузиться в мир CV. Основа у вас есть, а металлический конструктор не так страшен в создании новых элементов.
Шаг 9. Изготовление робота. Создание основания или каркаса робота.
Теперь, вы выбрали все основные компоненты для сборки робота. Изготовление робота начинается со следующего шага — необходимо спроектировать и построить основание или каркас. Каркас держит их всех вместе и придает вашему роботу законченный вид и форму.

сборка робота
Создание каркаса
Нет никакого «идеального» способа создания каркаса. Почти всегда требуется компромисс. Возможно, вам нужен легкий каркас. Но может потребоваться использование дорогостоящих материалов или слишком хрупких материалов.
Вы можете захотеть сделать надежное или большое шасси. Хоты вы понимаете, что это будет дорого, тяжело или сложно в производстве. Ваш «идеальный» каркас или рама может быть очень сложным.Изготовление каркаса робота может потребовать слишком много времени для разработки и создания.
При этом простой каркас может быть не менее хорошим. Идеальная форма встречается редко, но некоторые проекты могут выглядеть более элегантно из-за своей простоты. Возможно другие проекты могут привлечь внимание из-за их сложности.
Материалы
Существует много материалов, которые вы можете использовать для создания основания. Вы используете все множество материалов для создания не только роботов, но и других устройств. Следовательно вы получите хорошее представление о том, что наиболее подходит для данного проекта.
Список предлагаемых строительных материалов, приведенных ниже включает только наиболее распространенные. Как только вы используете некоторые из них, вы сможете поэкспериментировать с теми, которые не входят в список, или объединить их вместе.
Использовать существующие коммерческие продукты
Вероятно, вы видели школьные проекты, которые были основаны на существующих массовых продуктах. В первую очередь таких как бутылки, картонные коробки и т.д. Это, по сути, «повторное использование» продукта.
Оно может либо сэкономить вам много времени и денег. Хотя и может создать дополнительные хлопоты и головную боль. Есть много очень хороших примеров того, как перепрофилировать материалы и сделать из них очень хорошего робота.
Основной строительный материал
Например, изготовление робота из картона. Некоторые из самых основных строительных материалов могут быть использованы для создания отличных каркасов. Одним из самых дешевых и наиболее доступных материалов является картон. Вы часто можете найти картон бесплатно, и его можно легко вырезать, согнуть, склеить и сложить.

робот из картона
Может быть вы можете создать усиленную картонную коробку, которая выглядит намного более красиво. И она соответствует размеру вашего робота. Затем вы можете нанести эпоксидную смолу или клей, чтобы сделать ее более долговечной. В заключение дополнительно можно разукрасить ее.
Плоский материал для конструкции
Один из наиболее распространенных способов сделать раму – это использовать стандартные материалы, такие как лист фанеры, пластика или металла. И просверлить отверстия для подключения всех исполнительных механизмов и электроники. Прочный кусок фанеры может быть довольно толстым и тяжелы. В то самое время как тонкий лист металла может быть слишком гибким.
Например, доску или фанеру из плотной древесины можно легко разрезать с помощью пилы, просверлить (не опасаясь разрушения), покрасить, отшлифовать и т.д. Следовательно вы можете устанавливать устройства с двух сторон. Например, подключить двигатели и колесики колес к нижней части, а электронику и аккумулятор к верхней части. При этом древесина останется неподвижной и твердой.
Лазерная резка, изогнутый пластик или металл
Если вы находитесь на том этапе, когда вам необходим внешний блок, то лучшим вариантом будет высокоточная резка деталей лазером. Любая ошибка в расчетах будет дорогостоящей и приведет к порче материалов. Для изготовления робота нужна собственная мастерская. Возможно нужно найти компанию, производящую такой тип роботов. Может быть она предлагает множество других услуг, включая работы с металлом и покраску.
3D-печать
3D принтер, печатающий раму или каркас, редко бывает наиболее обоснованным решением (потому что он печатает послойно). В результате этого процесса можно создавать очень сложные формы. Такие формы было бы невозможно (или очень сложно) изготовить другими способами.

3D принтер
Отдельная трехмерная печатная деталь может содержать все необходимые монтажные точки для всех электрических и механических компонентов. При этом способе изготовления каркаса сохраняется незначительный вес изделия. Изготовление робота потребует дополнительной обработки и шлифовки.
Поскольку 3D-печать становится более популярной, цена на детали также снижается. Дополнительно преимуществом 3D-печати является не только то, что ваш дизайн легко воспроизводить, но и им легко делиться. При помощи нескольких кликов мышки можно получить все инструкции по дизайну и файлы САПР.
Полиморф
При комнатной температуре полиморф является твердым пластиком. При нагревании (например, в горячей воде) он становится податливым и может быть сформирован в сложные детали. Затем они охлаждаются и затвердевают в прочные пластмассовые детали.
робот из полиформа
Обычно пластиковые детали требуют высоких температур и необходимы различные формы для изготовления. Изготовление робота таким способом делает их недоступными для большинства любителей. Например, вы можете комбинировать различные формы (цилиндры, плоские листы и т.д.).
Так формируются сложные пластмассовые структуры, которые выглядят как сделанные промышленным способом. Вы также можете экспериментировать с различными формами и достичь с помощью этого материала многого.
Изготовление робота
Конструирование и изготовление робота нужно производить с учетом выбранных материалов и методов. Выполните следующие шаги, чтобы создать эстетичную, простую и структурно обоснованную раму робота меньшего размера.
- Сначала нужно сделать прототип конструкции, выполненный из бумаги, картона или металла.
- Получите все комплектующие, которые потребуются для изготовления робота (электрические и механические), и измерьте их.
- Если у вас нет всех ваших деталей под рукой, вы можете обратиться к размерам, предоставленным производителем.
- Проведите мозговой штурм и набросайте несколько разных конструкций каркаса в общих чертах. Не делайте это слишком подробно.
- После того, как вы выбрали дизайн, убедитесь что компоненты будут хорошо поддерживаться.
- Нарисуйте каждую часть вашего робота в бумаге или картоне со шкалой 1:1 (реальный размер). Вы также можете нарисовать их с помощью программного обеспечения САПР и распечатать их.
- Протестируйте свой дизайн в САПР и в реальной жизни с помощью прототипа бумаги, проверив каждую деталь и соединения.
- Если вы абсолютно уверены, что ваш дизайн правильный, наконец начните изготавливать каркас из выбранных материалов. Помните, дважды измерьте и вырежьте только один раз!
- Перед монтажом рамы проверьте соответствие каждого компонента и, если потребуются, модифицируйте его.
- Соберите свою раму, используя горячий клей, винты, гвозди или любые другие соединения, которые вы выбирали для изготовления своего робота.
- Установите все компоненты на каркас. Так вы только что создали робота с нуля!
Сборка компонентов робота, из приведенного выше списка заслуживает отдельного рассмотрения.
Сборка компонентов робота
На предыдущих уроках вы выбрали электрические компоненты и исполнительные механизмы. Теперь вам нужно, чтобы они все работали вместе. Как всегда, техническое описание и руководства — это ваши друзья, когда вы понимаете, как должно работать ваше роботизированное оборудование.
Подключение двигателей к контроллерам двигателей
Электродвигатель постоянного тока или линейный привод постоянного тока, скорее всего, имеют два провода: красный и черный. Подключите красный провод к клемме M + на контроллере двигателя постоянного тока, а черный — к M-.
Реверсирование проводов приведет только к вращению двигателя в противоположном направлении. У сервомотора, есть три провода: один черный (GND), красный (от 4,8 до 6 В) и желтый (сигнал положения). Контроллер серводвигателя имеет контакты, соответствующие этим проводам, поэтому сервопривод может быть подключен непосредственно к нему.
Подключение аккумуляторов к контроллеру двигателя или к микроконтроллеру
Изготовление робота включает в себя подключение электропитания. Большинство контроллеров моторов имеют две винтовые клеммы для проводов батареи, обозначенных как B + и B-. Если ваша батарея поставляется с разъемом, а ваш контроллер использует винтовые клеммы, вы можете найти разъем для соединения с проводами.
Провода вы можете подключить к винтовому соединению. Хотя вам может потребоваться найти другой способ подключения аккумулятора к контроллеру двигателя.Возможно, что не все электромеханические устройства, которые вы выбрали для своего робота, могут работать при одинаковом напряжении.
Следовательно, могут потребоваться несколько цепей управления батареями или напряжением. Ниже приведены обычные уровни напряжения, используемые в общих компонентах роботизированных платформ:
- электродвигатели постоянного тока — от 3 до 24 В
- стандартные серводвигатели — от 4,8 В до 6 В
- специальные сервомоторы — от 7,4 до 12 В
- шаговые двигатели — от 6 до 12 В
- микроконтроллеры обычно включают регуляторы напряжения — от 3 до 12 В
- датчики — 3,3 В, 5 В и 12 В
- контроллеры постоянного тока — от 3 до 48 В
- стандартные батареи: 3.7V, 4.8V, 6V, 7.4V, 9V, 11.1V и 12V.
Если вы создаёте робота с двигателями постоянного тока, микроконтроллером и, возможно, сервомеханизмом или двумя, то можно легко понять, что одна батарея не может напрямую управлять всем. Прежде всего, мы рекомендуем выбрать батарею, к которой можно напрямую подключать как можно больше устройств.
Батарея с наибольшей емкостью должна быть связана с приводными двигателями. Например, если выбранные вами двигатели рассчитаны на номинальное напряжение 12 В, то ваша основная батарея также должна быть 12 В. Дополнительно вы можете использовать регулятор для питания микроконтроллера на 5 В.
Техника безопасности при работе с аккумуляторами
Внимание: аккумуляторные батареи являются мощными устройствами и могут легко сжечь ваши цепи, если они подключены неправильно. Прежде всегда тройная проверка правильной полярности и возможности работы устройства с энергией, обеспечиваемой батареей.
Если вы не уверены, не «догадывайтесь». Электричество намного быстрее, чем вы, и к тому времени, когда вы поймете, что что-то не так, волшебный синий дым уже пойдет от вашего устройства.

говорящий робот
Подключение контроллеров двигателя к микроконтроллеру
Микроконтроллер может взаимодействовать с контроллерами двигателя различными способами:
- Стандартный: контроллер имеет два контакта с маркировкой Rx (прием) и Tx (передача). Подключите контакт Rx контроллера двигателя к выходу Tx микроконтроллера и наоборот.
- I2C: контроллер двигателя будет иметь четыре контакта: SDA, SCL, V, GND. Ваш микроконтроллер будет иметь те же четыре контакта, но не обязательно помеченные. Просто подключите их один к одному.
- PWM (Pulse-width modulation): контроллер двигателя будет иметь как вход ШИМ, так и цифровой вход для каждого двигателя. Подключите входной контакт PWM контроллера двигателя к выходному контакту ШИМ на микроконтроллере. Соедините каждый цифровой входной контакт контроллера двигателя с цифровым выходным выводом на микроконтроллере.
- R / C: Чтобы подключить микроконтроллер к контроллеру двигателя R / C, вам необходимо подключить сигнальный контакт к цифровому выходу на микроконтроллере.
Независимо от способа связи логика контроллера двигателя и микроконтроллер должны совместно использовать один и тот же опорный сигнал заземления. Это достигается путем соединения контактов GND (земля) вместе.
В первую очередь нужно соединить контакты одного и того же логического высокого уровня. Этого можно добиться, используя тот же вывод V+ для питания оба устройства. Переключатель логического уровня требуется, если устройства не используют одни и те же логические уровни (например, 3.3V и 5V)
Подключение датчиков к микроконтроллеру
При изготовлении робота обязательно используются сенсорные устройстве -в первую очередь датчики. Датчики могут быть сопряжены с микроконтроллерами аналогично контроллерам двигателя. Датчики (сенсоры) могут использовать следующие типы связи:
- Цифровой: датчик имеет цифровой вывод сигнала, который подключается непосредственно к цифровому выходу микроконтроллера. Простой переключатель можно рассматривать как цифровой датчик.
- Аналоговый: аналоговые датчики производят аналоговый сигнал напряжения, который должен считываться аналоговым выводом. Если ваш микроконтроллер не имеет аналоговых контактов, вам понадобится отдельная аналого-цифровая схема (АЦП). Кроме того, некоторые датчики с требуемой схемой питания обычно имеют три контакта: V+, GND и Signal. Например, если датчик представляет собой простой переменный резистор, вам потребуется создать делитель напряжения для считывания полученного переменного напряжения.
- Стандартный или I2C: здесь применяются те же принципы связи, которые описаны для контроллеров двигателей.
Устройство связи с микроконтроллером
Большинство коммуникационных устройств (например, XBee, Bluetooth) используют последовательную связь. Следовательно требуются те же соединения RX, TX, GND и V+. Важно отметить, что, хотя несколько последовательных подключений могут использоваться совместно на одних и тех же выводах RX и TX, для предотвращения перекрестных помех, ошибок и сбоев в целом требуется надежное управление.
Если у вас очень мало последовательных устройств, часто бывает проще использовать один последовательный порт для каждого из них.
Колеса для двигателей
В идеале, вы выбрали колеса или звездочки, которые предназначены для установки на вал вашего электродвигателя. Возможно, вам придется подгонять отверстия для соединения двигателей, рулевого управления и различных проводов в одну конструкцию.
Электрические компоненты для рамы
При изготовлении робота вы можете смонтировать электронные компоненты на раме робота при помощи множества методов. Прежде всего убедитесь в том, что ваши крепления надежны. Основные методы креплений включают в себя: винты, гайки, двухсторонний скотч, липучки, клей, стяжки и т. д.
Практическая часть
В нашем случае мы будем использовать набор Lego EV3 и для создания каркаса робота нам потребуются только стандартные детали, которые уже входят в состав набора. Изготовление робота на основе набора Лего является прежде всего относительно несложным и достаточно быстрым.
Самодельный робот-пылесос
Самодельный робот пылесосит пол с помощью вакуума, создаваемого турбинкой компьютерного кулера. Автоматически передвигается по комнате, избегая стен и мебели. Собран за пару дней.
Под катом — картинки

Для управления роботом можно использовать дешевый микроконтроллер AVR и драйвер мотора. Этот робот управляется AVR ATMega48 и драйвером L293D, собранными на макетной плате. Микросхема L293D во время работы может довольно сильно нагреваться, поэтому на нее установлен алюминиевый радиатор.
Для питания используется 6 вольтовый свинцовый аккумулятор. 5-ти вольтовый регулятор L7805 обеспечивает необходимые для питания МК 5 вольт.
Контроллер может иметь меньше контактов — эта плата была собрана для прототипирования.
ATMega запрограммирована на бейсике — используя BascomBasic.


На плате контроллера также собран step-up конвертер напряжения, поскольку компьютерному кулеру требуется 12 вольт, а напряжение аккумулятора 6 вольт.
Конвертер собран на микросхеме MC34063A. Схема подключения и параметры компонент можно подобрать по одному из онлайн калькуляторов (например этому)

Все соединения сделаны на обратной стороне платы проводками (предпочитаю использовать провода во второпластовой изоляции, которая не плавится при пайке). Резисторы 180 Ом ограничивают ток на входах МК, к которым подключены контакты бамперов.

Пластиковая банка (для пищевых продуктов) или небольшое пластиковое ведро можно использовать в качестве корпуса. Часть стенок используется как панели бамперов.

Из металлической ленты (купленной в строительном магазине) по размеру корпуса собран каркас робота. Моторы, редукторы и колеса взяты от игрушечной машинки-«перевертыша».

Турбинка кулера прикручена на картонную коробку — это пылесборник. В коробку вкладывается кусок кухонной салфетки из нетканного материала. Воздух всасывается через щель в дне коробки, проходит через ткань, оставляя на ней пыль. Турбинка слабенькая, но тем не менее после 10-20 минут бегания по «вроде-бы чистому» полу, в пылесборнике обнаруживается неприятно много пыли.
Маленькое мебельное колесико смонтировано свободно вращающимся на оси.



Бамперы вырезаны в корпусе робота. При столкновении с препятствием бампер нажимает своей поверхностью на контакты, сделанные из обрезков медной проволоки, замыкая из на металлическую раму. Рама подключена к минусу питания («земля»,«общий»), контакт подключен через резисторы 180 Ом к входам МК (входы подтянуты внутренними резисторами к питанию).
Шаг 8. Как собрать робота. Робототехническая лаборатория.
Как и где собрать робота. На этом этапе у вас должны быть все основные компоненты для вашего робота. Они включают в себя приводы, контроллеры двигателей, микроконтроллер, датчики и системы связи.

как собрать робота в робототехнической лаборатории
Теперь вы приближаетесь к этапу сборки, где вы объедините все эти части в настраиваемую роботизированную систему. Для этого вам нужно будет укомплектовать вашу робототехническую мастерскую или лабораторию соответствующими инструментами.
Собрать робота в мастерской или лаборатории
Есть несколько возможных сценария для оснащения роботизированной лаборатории. Выбор приборов и инструментов, которые нужно добавить в вашу лабораторию, зависит от того, сколько роботов вы планируете сделать. И в первую очередь от того, как вы занимаетесь робототехникой и какой результат вы хотели бы получить.
В мире есть много конструкторов робототехники, у которых есть инструменты из нескольких типов лабораторий. И у них может быть свой набор приборов и инструментов, который они считают необходимым для того чтобы собрать робота.
- Первый тип мастерской предназначен для начинающих разработчиков роботов. Скорее всего они будут создавать несколько недорогих роботов для развлечения. Возможно будут заниматься каким-нибудь одним несложным проектом. Это мастерская с небольшим количеством недорогих инструментов. Но при правильном подходе и в правильных руках такая мастерская может быть использована для создания профессиональных роботов.
- Следующий тип мастерской является промежуточным типом между простой и профессиональной мастерской. Такая лаборатория подойдет для разработчиков, которые не являются «профессиональными». При этом они готовы вкладывать немного больше средств в оборудование, чтобы облегчить изготовление, сборку, тестирование и устранение неполадок. В результате здесь собрать робота будет намного проще.
- Профессиональная мастерская предназначена для пользователей, которые планируют создавать множество продвинутых роботов и прототипов.Они используют различные детали и материалы. Этот тип конструкторов робототехники хочет, чтобы готовый прототип выглядел настолько профессиональным, насколько возможно. Наконец они могут даже хотеть произвести небольшие производственные прогоны готового дизайна.
Собрать робота в профессиональной лаборатории намного проще, хотя нужны определённые навыки.Это тип мастерской или лаборатории, скорее всего, будет необходим в небольшой компании по производству робототехники. Трудно описать все инструменты, необходимые на этом уровне, но можно дать некоторые общие рекомендации.
Как всегда, очень важно иметь правильный инструмент для правильной задачи, и только вы знаете свои потребности лучше всего.
Ниже вы найдете небольшой обзор инструментов и материалов для вашей мастерской, с классификацией по уровню и типу.
Механические инструменты
Минимальный набор может включать в себя:
— Маленькие отвертки, которые необходимы при работе с электроникой. Их нужно не очень много, но их размер делает их более хрупкими.

набор отверток
— Набор отверток. В любую мастерскую нужен набор инструментов или инструмента, который включает в себя плоские, крестообразные и другие головки отверток.
— Игольчатые плоскогубцы. Они бывают очень полезны при работе с небольшими компонентами и деталями и являются очень недорогим дополнением к вашему набору инструментов. Они отличаются от обычных плоскогубцев тем, что могут проникать в места недоступные стандартным плоскогубцам.— Стрипперы и кусачки для проволоки.

бокорезы
Если вы планируете обрезать провода различного диаметра, то кусачки помогут вам сэкономить много времени и усилий. Прибор для снятия изоляции (стриппер), при правильном использовании будет удалять только изоляцию с кабеля, и не будет перегибать или портить провода. Другой альтернативой устройству для снятия изоляции с проволоки является пара кусачек, но конечный результат может быть не очень хорошим.
Ножницы, линейка, ручка, маркерный карандаш, канцелярский нож (или другой ручной режущий инструмент) помогут собрать робота. Эти вещи необходимы в любом офисе.
Промежуточный набор может включать в себя:
— Вращающийся инструмент
- Ротационные инструменты оказались невероятно универсальными и могут заменить большинство обычных электроинструментов. Прежде всего при условии, что работа, которая должна быть выполнена, выполняется в небольших масштабах. Они могут резать, сверлить, шлифовать, гравировать, полировать и т. д.
- Дрель бывает очень полезна, особенно при создании больших отверстий или использовании более прочных или более толстых материалов. Более дорогой вариант, например сверлильный станок, позволит вам высверливать идеально перпендикулярные отверстия.
- Пилы различных типов необходимы, чтобы разрезать более толстые материалы или делать длинные прямые разрезы. Вы можете использовать ручную пилу, ленточную пилу, настольную пилу и т. д.
- Когда ваша работа становится более сложной, вам нужно будет надежно удерживать материалы и детали прочно на месте во время работы над ними. Следовательно необходимы тиски, которые позволяют добиться большей точности и качества изделия.
Профессиональный набор:
- Настольный станок с ЧПУ позволяет обрабатывать пластмассы, металлы и другие материалы и создавать трехмерные, сложные формы.
- Настольный токарный станок (ручной) позволяет создавать собственные валы, прокладки, адаптеры и колеса из различных материалов. Токарный станок с ЧПУ является избыточным, поскольку большинству конструкторов роботов нужно только изменить диаметр, а не создавать сложные формы.
- Вакуумные формовочные машины используются для создания сложных пластиковых оболочек, которые сформованы по вашим конкретным спецификациям.
- Листогибочные станки – нужны для создания роботизированных рамок или корпусов из листового металла. Они дают возможность получить точные и повторяемые изгибы.
- Другие специализированные инструменты. Когда вы более точно поймете, какая механическая обработка вам нужна, возможно, потребуются более специализированные инструменты. Это дополнительно набор инструментов по металлу, сварочные аппараты, 3D-принтеры и т. д.
Электрические инструменты
Минимальный набор:
— Беспаечная монтажная плата.
беспаечная монтажная плата
Эти платы используются для простого создания схем прототипов без необходимости пайки. Это хорошо в том случае, если вы еще не полностью освоили свои навыки пайки. Возможно вы хотите быстро собрать прототипы и протестировать идеи, не прибегая к пайке новой схемы каждый раз.
— Провода перемычки — идеально подходят для соединений между контактами на монтажной плате и не только выглядят красиво, но и предотвращают беспорядок.
— Блок питания макета. При экспериментировании с электроникой очень важно иметь надежный и простой в использовании источник питания.
блок питания макета
— Набор для паяльного инструмента. В недорогой комплект паяльника входят все основные компоненты, необходимые, чтобы помочь вам припаять и создавать простые схемы.
— Мультиметр используется для измерения напряжения, сопротивления, тока, проверки целостности соединений и т. д. Если вы знаете, что будете создавать множество роботов и работать с электроникой, то разумно приобрести более качественный мультиметр.

мультиметр
— Настенный адаптер. Стандартные напряжения, используемые в робототехнике, включают: 3,3 В, 5 В, 6 В, 9 В, 12 В, 18 В и 24 В. Настенный адаптер также может быть хорошей заменой для батарей, так как они могут быть очень дорогими в долгосрочной перспективе. Настенный адаптер может позволить вам работать над вашим проектом без перерывов. Ведь даже перезаряжаемые батареи необходимо перезаряжать.
Промежуточный набор:
Промежуточный тип лаборатории базируется на основной лаборатории, добавляя следующее:
— Регулируемая температурная паяльная станция.
— Паяльник с переменной температурой со сменными наконечниками позволит вам быть более точным и снизить риск горения или плавления компонентов.
— Оплетка для снятия припоя или отсос помогут очистить наконечник паяльника, не охлаждая его, позволяя вам быстрее и качественнее паять.
— Переменный источник питания (вместо адаптера на стене). Наличие мощного и надежного источника питания очень важно при разработке сложных схем и роботов. Переменный источник питания позволяет вам тестировать различные напряжения и токи без хлопот. Прежде всего не требуется несколько типов батарей и силовых адаптеров.
Профессиональный набор дополнительно включает в себя:
— Осциллограф — очень полезен при работе с аналоговыми схемами или периодическими сигналами.
— Логический анализатор. Логический анализатор похож на осциллограф. Цель логического анализатора — запись цифрового (но не всегда только цифрового) сигнала с последующим его анализом в удобных программах. Он позволяет просматривать и хранить данные, получаемые с микроконтроллера, и упрощает отладку цифровых схем.
Дополнительно
— Наиболее распространенный диаметр провода, используемый в робототехнике, составляет 0,64 мм. Хотя у многожильных проводов есть свои преимущества, одножильный провод позволяет легко подключать их к штыревым разъемам и макетам.
— Набор для пайки с увеличительным стеклом, зажимами и держателем для паяльника.
набор для пайки с увеличительным стеклом
Такой набор позволяет надежно фиксировать платы и детали во время пайки. Можно рассмотреть мелкие детали и оставлять паяльник в держателе, не опасаясь ожогов.
— Горячий клей и термоклеевый пистолет полезен независимо во многих случаях. Клей, который выходит из горячего пистолета, быстро застывает и обеспечивает хорошее склеивание различных компонентов.
В отличие от обычного клея, этот клей трехмерен, что означает, что вы можете использовать его в качестве разделителя, клея, наполнителя и т.д.
— Более толстые провода. Когда вы создаете более крупные роботы, двигатели постоянного тока потребуют более высоких токов и, следовательно, нужны кабели большего диаметра.
— Штангенциркуль цифровой позволяет более точно измерять детали, а также диаметры (как внутри, так и снаружи).
Программное обеспечение для программирования.
Первое программное обеспечение для программирования должно соответствовать любому выбранному микроконтроллеру. Если вы выбрали микроконтроллер Arduino, то вы должны выбрать программное обеспечение Arduino. Программное обеспечение должно соответствовать выбранному микроконтроллеру.
Если вы выбрали линейку Lego, то вы должны выбрать программное обеспечение для Lego.
программное обеспечение LabView
Чтобы использовать различные микроконтроллеры, вы можете изучить более фундаментальный язык программирования, такой как BASIC или C.
Схемы и печатные платы. На них я не буду подробно останавливаться. На рынке доступно множество популярных бесплатных программ. Они включают обширную библиотеку деталей и помогают преобразовать вашу схему в печатную плату.
Для профессиональных лабораторий существует множество платных программ САПР и 3-D моделирования, но это отдельная большая тема и ее лучше изучать отдельно, не в рамках этого обзора.
— Могут потребоваться листы пластика различной толщины и размера.
Этот материал можно легко разрезать ножницами и может быть согнут и сформирован, по мере необходимости. Он используется для создания рамы или других компонентов вашего робота без необходимости выполнять механическую обработку.

листы пластика
— Картон. Картон (толстый, но все еще разрезаемый с помощью ручных инструментов) может быть легко использован для изготовления рамы или прототипа. При помощи картона и клея можно изготавливать различные конструкции.
— Тонкая фанера — отличный материал для работы. Фанеру можно закреплять при помощи винтов, шурупов, склеивать, шлифовать и так далее.
Профессиональный набор может включать в себя:
— Полиморфус.
Собрать робота можно при помощи полиморфуса. Это пластик для различных целей — его используют как обычный пластилин, но он имеет свою уникальную особенность.

полиморфус
При небольшом нагреве (в горячей воде) он размягчается, а потом, при остывании — застывает и становится очень твердым. В результате это позволяет создавать пластиковые детали без хлопот для создания различных форм.
— Листовой металл. Если у вас есть металлообрабатывающие станки, то листовой металл является отличным материалом для рамы робота. Он долговечен, гибок и устойчев к ржавчине.
При использовании набора Lego EV3 вам не понадобится дорогостоящая лаборатория для создания различных моделей роботов. Этот набор включает в себя множество пластиковых стандартных деталей. Собрать робота можно за короткое время. Хотя функционал будет несколько ограничен. Так же нет необходимости в приобретении программного обеспечения. Его можно скачать с официального сайта Lego бесплатно.
Роботы из металлолома (фотографии)

Для того чтобы сделать из металлолома робота (не правда ведь, именно это приходит в голову), нужно, прежде всего, определиться: есть ли у вас целый чемодан со старыми железками: это проволока, пружинка, гаечные ключи, велосипедные цепи, шестеренки, подшипники, старые гнутые алюминиевые вилки и ложки, полосы металла….
Если это все есть, то легче всего будет просто пофантазировать: взять и начать комбинировать между собой детали, просто так, ни о чем не думая. И в какой – то момент вы можете увидеть рождение замысла. А потом станет легче, проект начнет рождаться по мере выполнения.
Второй вариант более обстоятелен: нужно создать эскиз, понять, что именно и в каких комбинациях потребуется, и начать поиск деталей, которые можно найти при желании даже в своем доме.
но предупреждаем, что потребуется слесарная мастерская придачу к навыку, умению и трудолюбию. И тогда вы с успехом сможете сделать вот это:

Рука робота из металлолома
О соединении деталей
Для того чтобы соединять отдельные металлические части, чаще всего пользуются точечной сваркой или пайкой, это придает скульптурам нарядный вид и долговечность.
Как известно, металлы очень плохо склеиваются, и практически не стоит надеяться на то, что вам удастся склеить две металлические детали достаточно жестко. Этому мешает то, что детали довольно тяжелые, их нужно обезжиривать, да и после этого соединения клея с металлом (особенно полированным) является очень ненадежным. Поэтому на первых порах можно посоветовать выполнять проволочные соединения.
Роботы из металлолома на проволочных соединениях могут выглядеть, как обычные поделки: так, например, очень забавно выглядят роботы из скрепок, которые могут украсить вашу кухню.

Своеобразные роботы из металлолома
В том случае, если вы решили сделать более «урбанистического» робота, то вам потребуются следующие инструменты:
- Слесарные тиски;
- Ножовка по металлу;
- Наборы напильников, надфилей;
- Пробойник;
- Пассатижи;
- Кусачки;
- Сверла по металлу и дрель;
- Молоток;
- Паяльник, канифоль, специальные флюсы и припои для лучшего смачивания меди или алюминия.
В том случае, если у вас нет трансформатора для точечной сварки, остановитесь на цветных металлах: алюминий паять гораздо легче, чем сталь, для которой нужно латунный припой и температура до 1000 градусов.
Можно соединять детали с помощью мелких отверстий, в которые вставляются маленькие проволочные «скрутки». Если фиксировать эти скрутки в нескольких местах, то деталь будет неподвижной.
В заключение покажем вам несколько фотографий. Роботы из металлолома своими руками из подручного хлама получаются, как живые.
Роботы из металлолома своими руками
Как видно, использование алюминиевых вилок вместо рук – замечательная идея: если придать им необходимую форму, то можно выразить, пожалуй, даже любой жест и оттенки настроения.
Для регулярного пополнения деталей можно посещать радиорынки, поскольку много различных совершенно никому не нужных железяк можно приобрести именно там, или даже на толкучке.
Велосипедные звонки могут превосходно имитировать панцири насекомых и зловещих крабов, а также роботов – пауков:

Робот-паук из металлолома
В том же случае, если вы полны решимости «замахнуться на великое», то есть, у кого учиться:
Читайте также: